













Hiwonder JetTank ROS Robot Tank Powered by Jetson Nano with Lidar Depth Camera Touch Screen, Support SLAM Mapping and Navigation


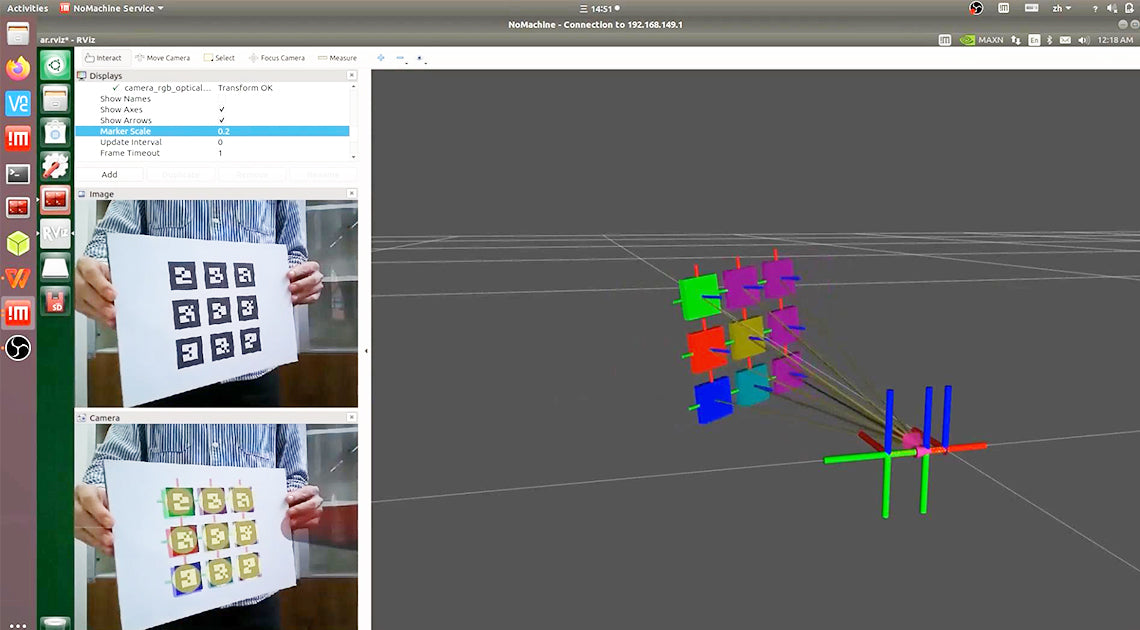
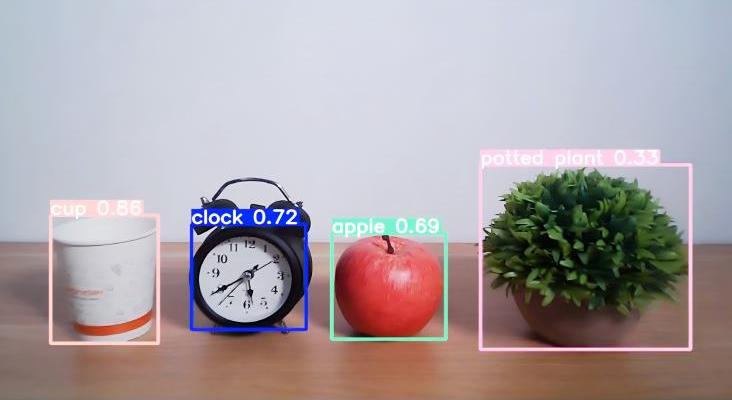
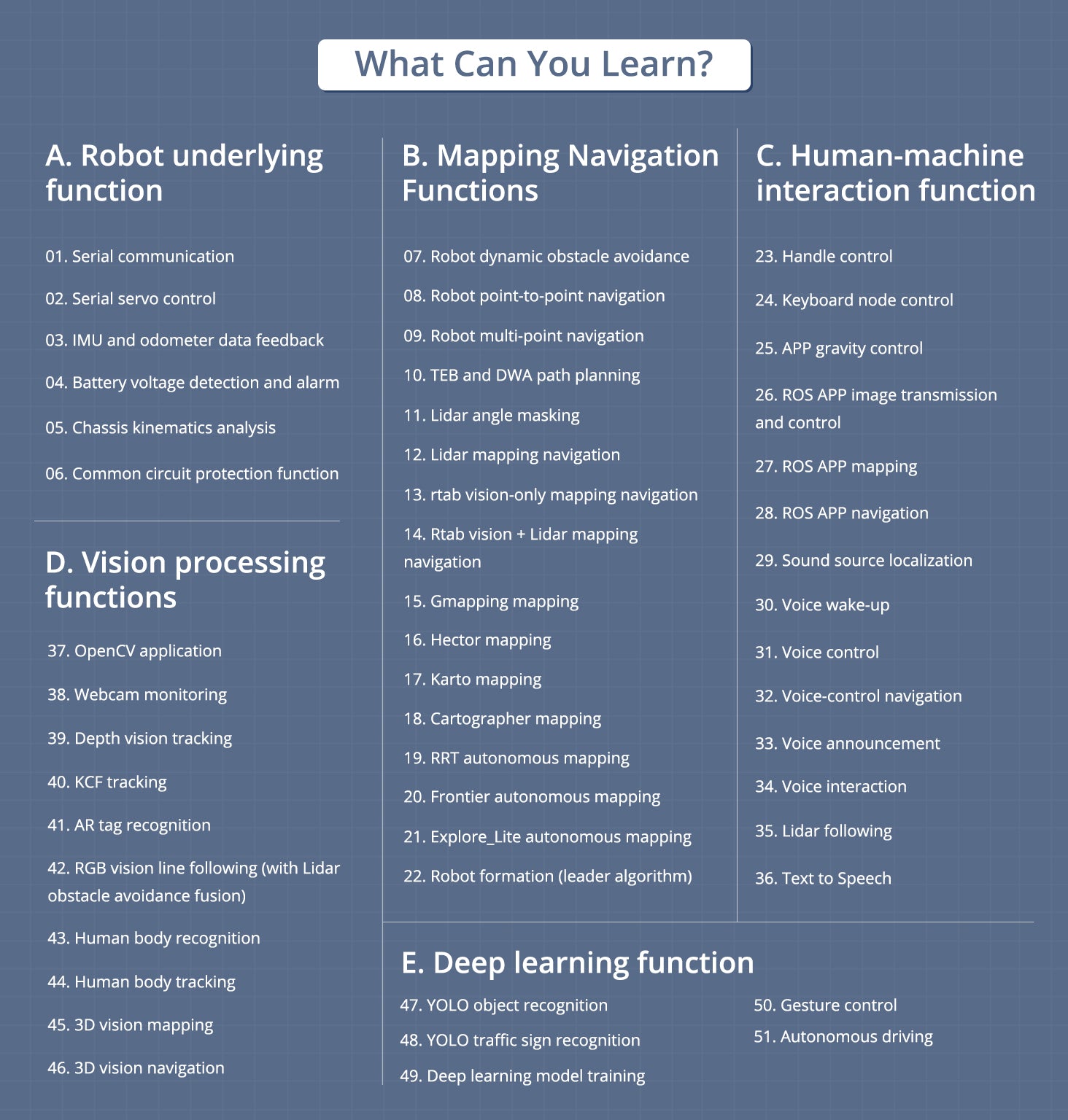
- 【Smart ROS Robots Driven by AI】 JetTank supports Robot Operating System (ROS). It leverages mainstream deep learning frameworks, incorporates MediaPipe development, enables YOLO model training. This combination delivers 3D machine vision applications, including autonomous driving, somatosensory interaction and KCF target tracking.
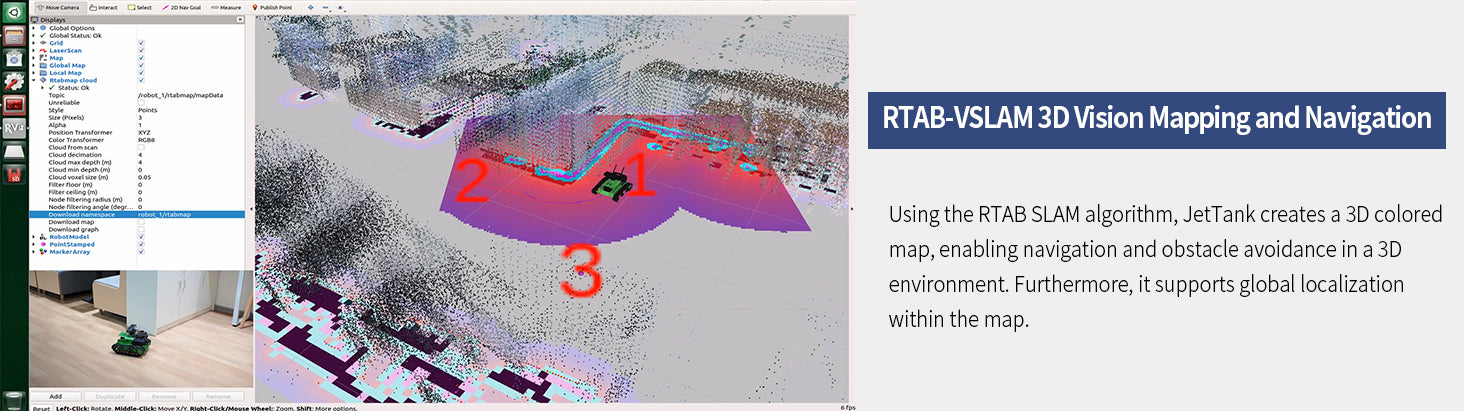
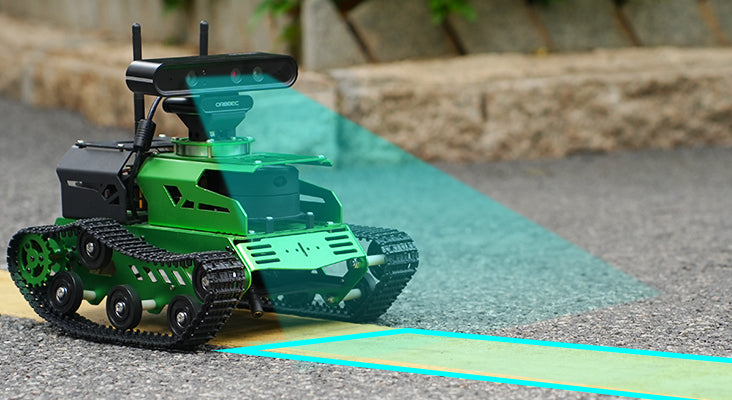
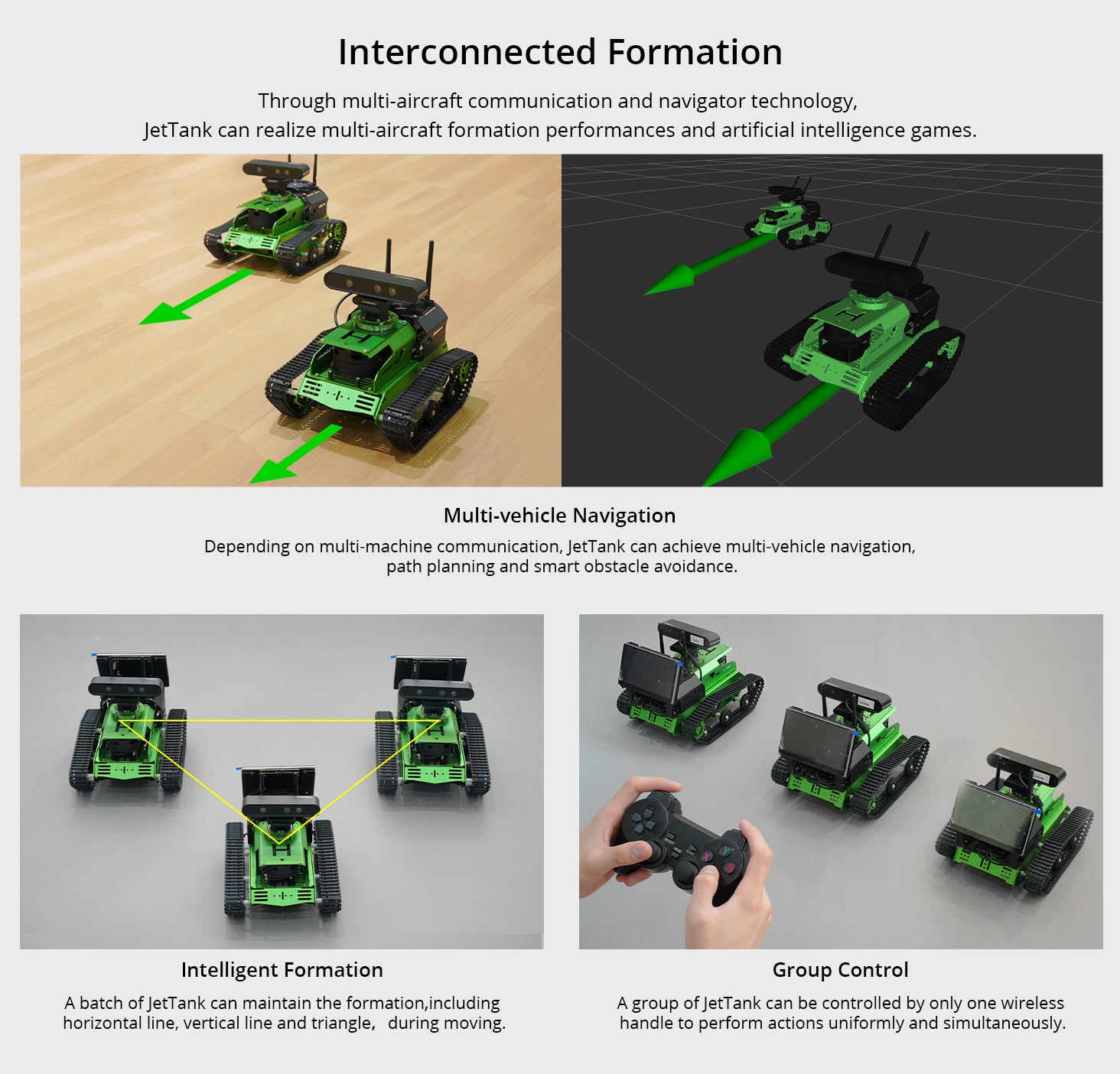
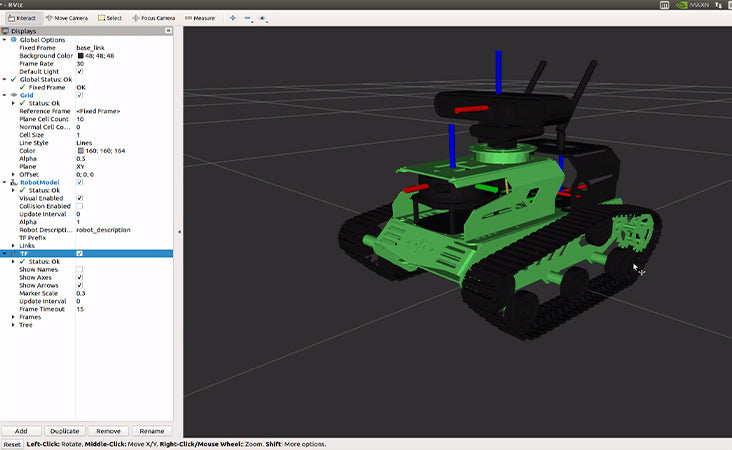
- 【SLAM Development and Diverse Configuration】JetTank is equipped with a 3D depth camera and Lidar. It utilizes a wide range of advanced algorithms including gmapping, hector, karto and cartographer, enabling precise multi-point navigation, TEB path planning, and dynamic obstacle avoidance.
- 【High-performance Hardware Configurations】JetTank is made of aluminum alloy and employs various hardware components, including reinforced nylon continuous track, 520 Hall encoder gear motors, metal drive wheel, Lidar, Astra Pro Plus depth camera, 6-microphone array, speaker, etc.
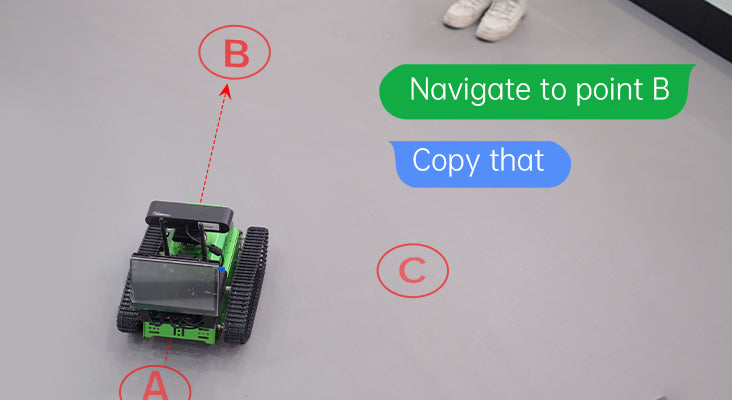
- 【Far-field Voice Interaction】JetTank advanced kit incorporates a 6-microphone array and speaker allowing for man-robot interaction applications, including Text to Speech conversion, voice wake-up, 360° sound source localization, voice-controlled mapping navigation, etc.
- 【Robot Control Across Platforms】JetTank provides multiple control methods, like WonderAi app (iOS&Android), wireless handle, Robot Operating System (ROS) and keyboard, allowing you to control the robot at will.




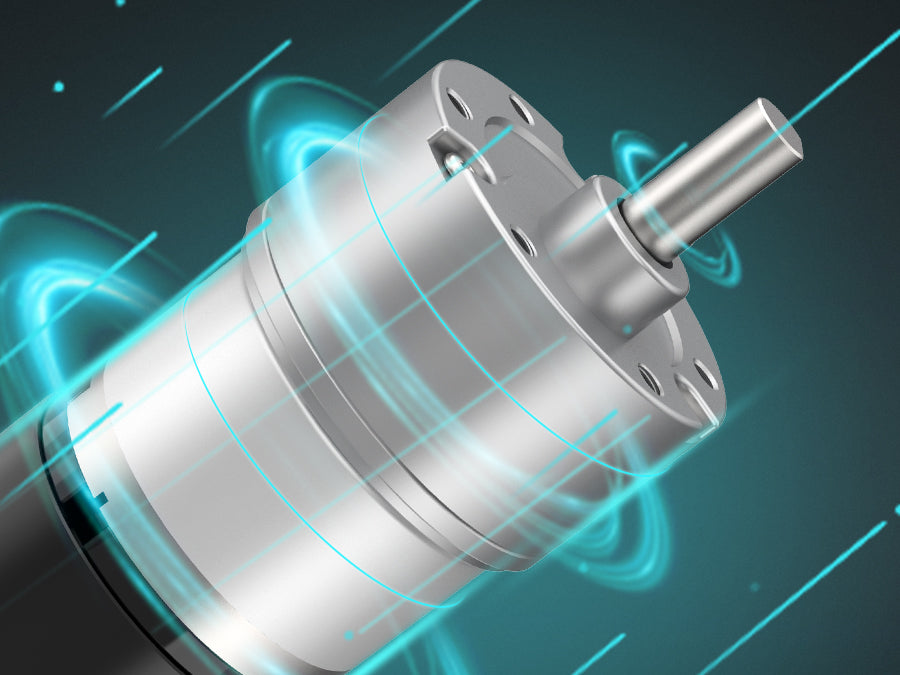
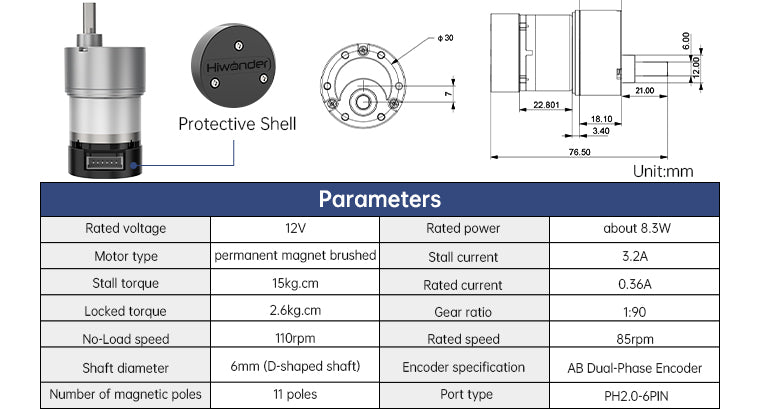
DC Geared Motor
It offers robust force, has a high-precision encoder,and includes a protective end shell to ensure an extended service life.

7-inch HD LCD Touch Screen
With a resolution of 1024 x 600 pixels and compatible with NVIDIA, this screen allows you to freely monitor and debug various parameters of the robot.

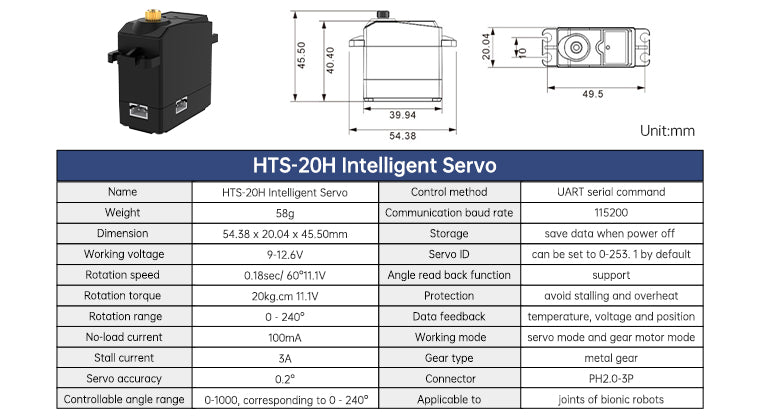
240° High-performance Pan-tilt
It is driven by an serial bus servo which provides over-temperature protection. Its up to 240° rotation range extends JetTank’s exploration ranges.

6CH Far-field Microphone Array
The 6-channel microphone array and speakers support sound source positioning, voice recognition control, voice navigation and other functions.






























Wrapped Rear Tail Shell
It can effectively protect the PCB circuit and magnetic ring at the end of the motor from external influences, effectively improving the safety and service life of the motor.
Permanent Magnet Brushed Motor
The permanent magnet DC motor has fast starting response speed, large starting torque and smooth speed change.

High-precision Magnetic Encoder
The motor is equipped with a high-precision magnetic encoder, has strong horsepower, high precision, and strong anti-interference ability.
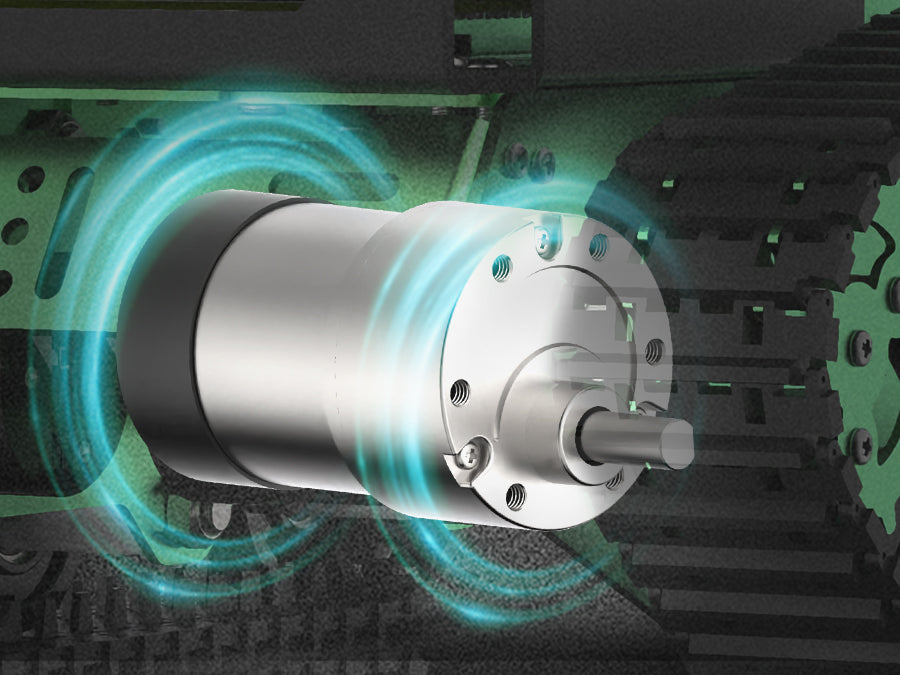
Adapt to Various Scenes
The low speed of 1:90 ratio and the high torque of 15kg.cm enable the motor to adapt to car chassis made of various materials.




|

|

|
|
|
|---|---|---|---|---|
| JetTank | JetAcker | JetAuto | JetAuto Pro | |
| Chassis | Tracked chassis | Ackerman steering structure | Pendulum suspension chassis | Pendulum suspension chassis |
| Wheel | Nylon track | 100mm Solid rubber wheel | 97mm Mecanum wheel | 97mm Mecanum wheel |
| Motor | 520 Motor*2 | 520 Motor*2 | 520 Motor*4 | 520 Motor*4 |
| Servo | Intelligent servo*1 | Intelligent servo*2 | Intelligent servo*1 | Intelligent servo*5 |
| Camera | Astra Pro Plus depth camera | Astra Pro Plus depth camera | Astra Pro Plus depth camera | Astra Pro Plus depth camera and monocular camera |
| Wheel | Nylon track | 100mm Solid rubber wheel | 97mm Mecanum wheel | 97mm Mecanum wheel |
| Lidar | SLAMTEC A1/ EAI G4 | |||
| Robot Arm | / | / | / | Monocular vision robotic arm |
| Features | ROS in-depth development Able to overcome obstacles | Autonomous driving research | Pendulum suspension for stable driving 360° omnidirectional movement | Grabbing and transporting |
| Size: | 310*246*265mm |
| Weight: | 2.9kg |
| Material: | Full-metal hard aluminum alloy bracket |
| Battery: | 11.1V 6000mAh lithium battery |
| Continuous working life: | 60min |
| Hardware: | ROS controller and ROS expansion board |
| Operating system: | Ubuntu 18.04 LTS + ROS Melodic |
| Software: | iOS/ Android app |
| Communication: | USB/ WiFi / Ethernet |
| Programming language: | Python/ C/ C++/ JavaScript |
| Storage: | 32GB TF card |
| Servo: | HTS-20H serial bus servo |
| Control method: | Phone/ Handle control |
| Package size (advanced kit): | 38*31*23cm |
| Package weight (advanced kit): | About 4kg |













| Item | Specification |
| Size | 310*246*265mm |
| Product weight | 2.9kg |
| Material | Full-metal hard aluminum alloy bracket (anodized) |
| Battery | 11.1V 6000mAh lithium battery |
| Continuous working life | 60min |
| Hardware | ROS controller and ROS expansion board |
| Operating system | Ubuntu 18.04 LTS + ROS Melodic |
| Software | iOS/ Android app |
| Communication | USB/ WiFi / Ethernet |
| Programming language | Python/ C/ C++/ JavaScript |
| Storage | 32GB TF card |
| Servo | HTS-20H serial bus servo |
| Control method | Phone/ Handle control |
| Package size (advanced kit) | 38*31*23cm |
| Package weight (advanced kit) | About 4kg |
Customer Reviews
I am still waiting for the product.
Hi Nicolas, thank you for your order. Your package is on the way Clearance in Progress. We will keep tracking for you!
decent price with LiDAR. I love the tutorials the most, which has comprehensive introduction on ROS, LiDAR, SLAM etc.
Nice Tracked Robot Car! It is well packed in the box, very good and strong motors with nice reduction boxes. I received great customer service!! The chassis is worth it!! The code can be chosen in C/C++ which is perfect for me as I'm currently learning that programming language.
Shipping was awesome, assembly was easy, really easy to program as described!!! I haven't tried it but you can control it via the Jetson system. There's even a project site with a library and documentation to learn to control the robot with ROS + Python. In short, this kit is a platform for many serious and ambitious projects.
After studying ROS courses for a long time, I finally decided to purchase this ROS car. The assembly process was pretty straightforward—just follow the installation guide carefully. The remote control is easy to use as well, and once the software is installed, you're ready to go. It feels great to finally dive into some hands-on experience!


Questions & Answers
Have a Question?
-
How am i supposed to have access to Hiwonder jetTank Wi-Fi in order to make it work
Please refer to this instructions: https://drive.google.com/file/d/1iCby64T6HX7YvFuYAoedTEOUqF4wE21l/view?usp=sharing
-
How am supposed get access to the Hiwonder jetTank Wi-Fi in order to make it work
Please refer to this instructions: https://drive.google.com/file/d/1iCby64T6HX7YvFuYAoedTEOUqF4wE21l/view?usp=sharing
-
Hello. I am a student studying in Korea. I am interested in your product. Is there a way to get tank modeling?
Thank you for cmoing Hiwonder. Tutorials for your reference: https://www.hiwonder.com.cn/store/learn/111.html
-
Do you sell this without the jetson nano?
All released versions include Jetson Nano


, Supports AI Vision, Voice Interaction, LiDAR, and Robotic Arm Attachment")
, Supports AI Vision, Voice Interaction, LiDAR, and Robotic Arm Attachment")







, Voice Control, SLAM & AI Vision")
, Voice Control, SLAM & AI Vision")


 Integration, AI Vision, and Voice Interaction")
 Integration, AI Vision, and Voice Interaction")
, AI Vision Tracking, Voice Interaction, and Hand-Eye Coordination")
, AI Vision Tracking, Voice Interaction, and Hand-Eye Coordination")