, Voice Control, AI Vision Interaction & SLAM")
, Voice Control, AI Vision Interaction & SLAM")
, Voice Control, AI Vision Interaction & SLAM")
, Voice Control, AI Vision Interaction & SLAM")
, Voice Control, AI Vision Interaction & SLAM")
, Voice Control, AI Vision Interaction & SLAM")
, Voice Control, AI Vision Interaction & SLAM")
, Voice Control, AI Vision Interaction & SLAM")
, Voice Control, AI Vision Interaction & SLAM")
, Voice Control, AI Vision Interaction & SLAM")
, Voice Control, AI Vision Interaction & SLAM")
, Voice Control, AI Vision Interaction & SLAM")
, Voice Control, AI Vision Interaction & SLAM")
, Voice Control, AI Vision Interaction & SLAM")
, Voice Control, AI Vision Interaction & SLAM")
, Voice Control, AI Vision Interaction & SLAM")
, Voice Control, AI Vision Interaction & SLAM")
, Voice Control, AI Vision Interaction & SLAM")
, Voice Control, AI Vision Interaction & SLAM")
, Voice Control, AI Vision Interaction & SLAM")

Hiwonder JetAcker AI Robot Kit – NVIDIA Jetson-Powered ROS1/ROS2 Educational Coding Robot with multimodal AI model (ChatGPT), Voice Control, AI Vision Interaction & SLAM
【AI-Driven & Jetson-Powered】 Hiwonder JetAcker is a high-performance ROS robot for STEAM education. Equipped with Jetson Nano/Orin Nano/Orin NX controllers and compatible with both ROS1 and ROS2, JetAcker integrates deep learning frameworks with TensorRT acceleration.
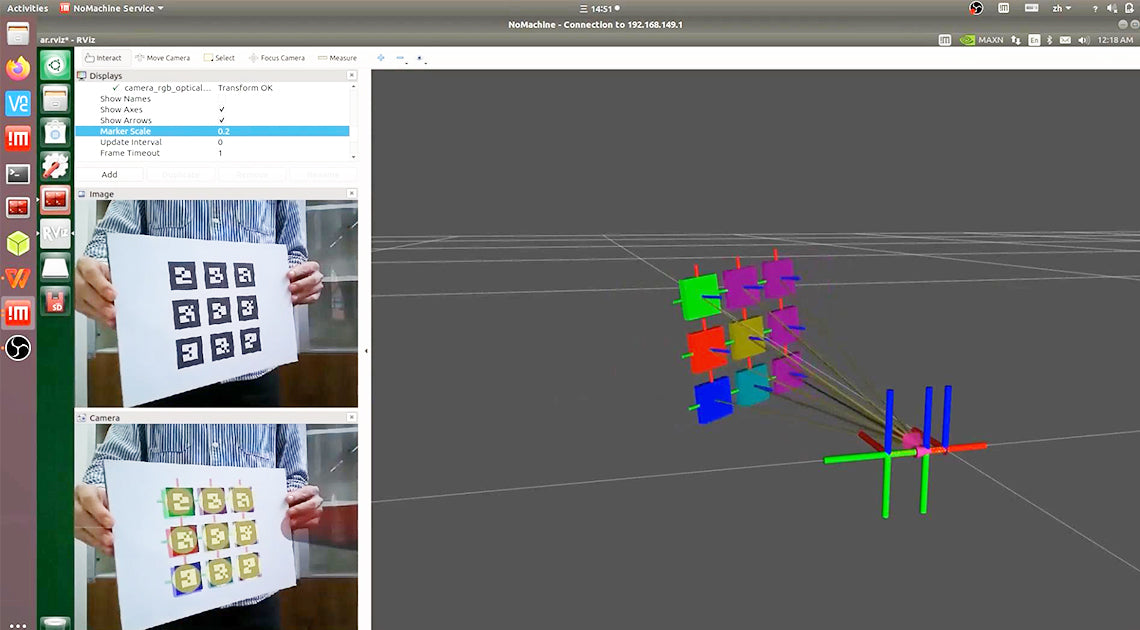
【SLAM Development and Diverse Configuration】Hiwonder JetAcker is equipped with a powerful combination of a 3D depth camera and Lidar. It utilizes a wide range of advanced algorithms including gmapping, hector, karto, cartographer and RRT, enabling precise multi-point navigation, TEB path planning, and dynamic obstacle avoidance. Using 3D vision, JetAcker AI robot can capture point cloud images of the environment to achieve RTAB 3D mapping navigation.
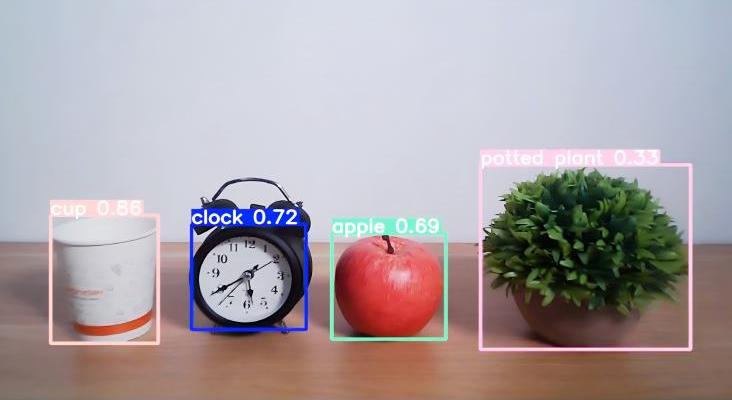
【Al Large Model Empowered, Human Robot Interaction Redefined】 JetAcker deploys multimodal models with ChatGPT at its core, integrating 3D vision and a 6-microphone array. This synergy enhances its perception, reasoning, and actuation capabilities, enabling advanced embodied AI applications and delivering natural, context-aware human robot interaction.
【Classical Ackermann Steering Mechanism】 The Ackermann chassis combines maneuverability and steering precision, facilitating the learning and validation of real-world vehicle steering principles. This design enables realistic simulation of autonomous driving scenarios for enhanced educational experiences.
【STEAM Education Tutorials】 Hiwonder JetAcker's structured curriculum guides users to master cutting-edge technologies including ROS development, SLAM mapping and navigation, 3D depth vision, OpenCV, YOLO26, MediaPipe, Large Al model integration, Movelt and Gazebo simulation, and voice interaction. Supported by extensive documentation and video tutorials, our progressive learning system breaks down complex concepts into digestible modules, guiding you from fundamentals to advanced implementations-empowering you to build your own intelligent robotic systems.


Master robotics with JetAcker tutorials! Access schematics, codes, videos & projects. Your all-in-one STEAM hub. Dive In Now! https://wiki.hiwonder.com/projects/JetAcker/en/jetacker-orin-nano/.






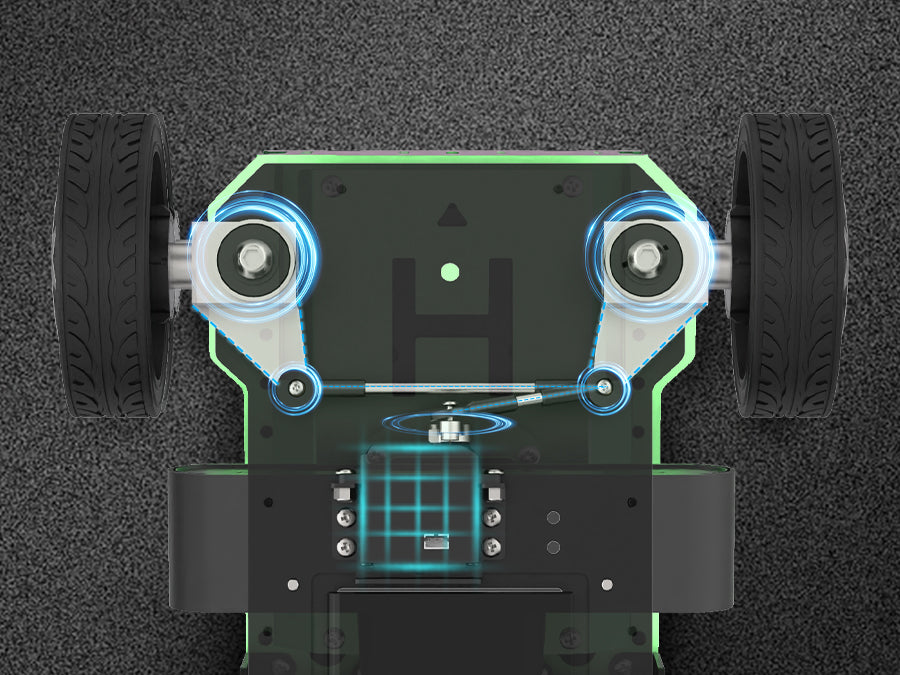
CNC Steering System
Exceptional rotational force is delivered by full-metal CNC high-precision components and strong-bearing intelligent servos.

High-density Solid Wheel
Payload capacity, deformation resistance, reduced friction coefficient and minimized mechanical wear, resulting in an extended lifespan.
Pendulum Suspension Structure
High-precision pendulum suspension structure balances the force, enabling good adaptability to uneven surfaces while preventing any impact on motor.

240° High-performance Pan-tilt
Hiwonder JetAcker is driven by an serial bus servo which provides over-temperature protection. Its up to 240° rotation range extends JetAcker's exploration ranges.


















































Wrapped Rear Tail Shell
It can effectively protect the PCB circuit and magnetic ring at the end of the motor from external influences, effectively improving the safety and service life of the motor.
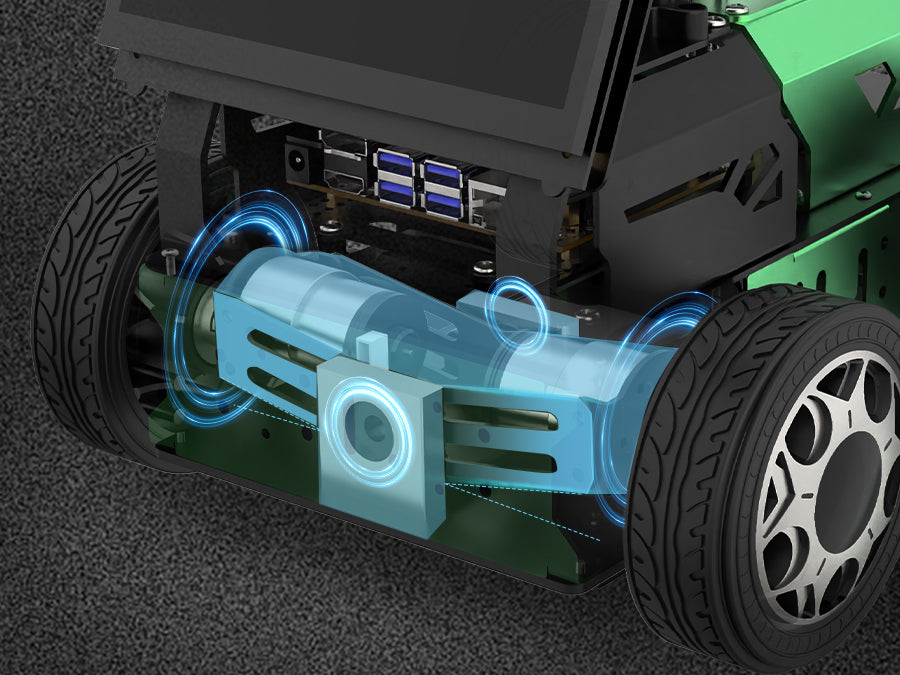
Permanent Magnet Brushed Motor
The permanent magnet DC motor has fast starting response speed, large starting torque and smooth speed change.

High-precision Magnetic Encoder
The motor is equipped with a high-precision magnetic encoder, has strong horsepower, high precision, and strong anti-interference ability.

Adapt to Various Scenes
The low speed of 1:90 ratio and the high torque of 15kg.cm enable the motor to adapt to car chassis made of various materials.








| Size: | 316*259*242mm |
| Weight: | 4.8kg |
| Material: | Full-metal hard aluminum alloy bracket |
| Battery: | 11.1V 6000mAh Lipo battery |
| Continuous working life: | 90min |
| Hardware: | ROS controller and ROS expansion board |
| Operating system: | Ubuntu 18.04 LTS + ROS Melodic |
| Software: | iOS/ Android app |
| Communication: | USB/ WiFi/ Ethernet |
| Programming language: | Python/ C/ C++/ JavaScript |
| Storage: | 32GB TF card |
| Servo: | HTS-20H serial bus servo |
| Control method: | Phone/ Handle control |
| Package size (advanced kit): | 38*31*23cm |
| Package weight (advanced kit): | About 5kg |















| Item | Specification |
| Size: | 316*259*242mm |
| Weight: | 4.8kg |
| Material: | Full-metal hard aluminum alloy bracket |
| Battery: | 11.1V 6000mAh Lipo battery |
| Continuous working life: | 90min |
| Hardware: | ROS controller and ROS expansion board |
| Operating system: | Ubuntu 18.04 LTS + ROS Melodic |
| Software: | iOS/ Android app |
| Communication: | USB/ WiFi/ Ethernet |
| Programming language: | Python/ C/ C++/ JavaScript |
| Storage: | 32GB TF card |
| Servo: | HTS-20H serial bus servo |
| Control method: | Phone/ Handle control |
| Package size (advanced kit): | 38*31*23cm |
| Package weight (advanced kit): | About 5kg |
Shipping & Delivery
1. Free Shipping Policy
Hiwonder offers free standard shipping on orders over US $499 (before tax and duties), delivered via trusted carriers such as DHL, UPS, or FedEx.
Most orders arrive within 6 working days after dispatch. You can check if your country is eligible for free shipping in the regions listed below.
Eligible Regions
- Americas: United States, Canada, Mexico, Chile
- Europe: Germany, United Kingdom, Netherlands, Switzerland, France, Austria, Italy, Belgium, Spain, Sweden, Finland, Norway, Portugal, Czech Republic, Poland, Greece, Slovenia, Romania, Denmark, Bulgaria, Luxembourg, Slovakia, Hungary, Ireland, Estonia, Lithuania
- Asia: China, Japan, Singapore, South Korea, United Arab Emirates, Malaysia, Thailand, Philippines, Indonesia
- Oceania: Australia, New Zealand
If your country or region is not listed above, the shipping cost will be automatically calculated at checkout once you enter your shipping address.
2. Customs & Import Fees
All international shipments are subject to local customs regulations. Import duties, taxes, or other fees may be charged by your country's customs authority upon arrival.
Our shipping term is FOB Shenzhen, which means these fees, if any, are the customer's responsibility. The shipping carriers will assist with the customs clearance process to ensure smooth delivery.
If a package is returned due to unpaid customs duties, any related return or reshipping fees will be deducted from your refund.
3. Order Processing Time
Orders are typically processed within 24 hours after placement and shipped the next business day.
Orders placed on weekends or public holidays will be shipped on the next working day.
Once shipped, you will receive a confirmation email with tracking information.

Questions & Answers
Have a Question?
-
Do you also sell the tracks, obstacles, enclosures, etc. for putting the car in the environment and letting it run?
Hi there, you can check the map and parts in this link: https://www.hiwonder.com/products/autonomous-driving-mapping-and-navigation-map-prop?_pos=3&_sid=a92c85546&_ss=r
-
Do you have the cad models availble?
Hi there! Please contact us at support@hiwonder.com with your order number and request. We will be happy to provide the .STP file for you. Our team is ready to help!
-
Where I can find the SDK?
Do you mean the e-tutorials? You could refer to this link: https://drive.google.com/drive/folders/1OpglB5QZyvdZ0ZBmC6jgjg1QOUtnKKTs?usp=sharing
-
Hello, can I run Llama 3.2 multimodal LLM on the robot with Jetson Orin Nano? Can it control the robot, camera, microfone array etc?
In theory, the system can run Llama 3.2 multimodal LLM properly; however, for components such as the camera and microphone, you will need to research and develop the necessary programs yourself. We do not provide related resources or content.
-
My car has been used by someone else and cannot connect properly. Can I restore it to factory settings? How can I do it?
Hi there, pls contact our support team with your order number to get the system image to reset.
-
I would like to test my own navigation and path planning algorithms with this robot. Is it possible?
Hello. The robot comes with a built-in mapping and navigation program. Unfortunately, we cannot guarantee that your own navigation and path planning algorithm will be compatible with the JetAcker. We recommend using the pre-installed program for optimal performance, but please feel free to reach out if you need further assistance~
-
Max speed is 0.5m/s? not 1.5 m/s? Is it slower than JetAuto (Mecanum Wheel, Max 0.7m/s) ?
Yes, the max speed for JetAcker is 0.5m/s
-
1. Max speed? 2. Is it possible to order from South Korea?
Hi there, the max no-load speed is 0.5m/s. You can order on our website directly and the package will be delivered to your address directly.
-
Material needed to build a jetacker ros
Hi there, pls check this tutorial link: https://www.hiwonder.com.cn/store/learn/120.html
-
Hi, I currently own the hiwonder robo arm and needed to fit it on top of the jetson vehicle. Will it be possible to do that integration? I need this for my university project.
Sorry, it cannot be integrated:(




, Supports AI Vision, Voice Interaction, LiDAR, and Robotic Arm Attachment")
, Supports AI Vision, Voice Interaction, LiDAR, and Robotic Arm Attachment")



, Vision AI, Interactive Voice Response, and Hand-Eye Coordination")
, Vision AI, Interactive Voice Response, and Hand-Eye Coordination")







