















JetAuto Pro ROS1 ROS2 Robot Car with Vision Robotic Arm Powered by Jetson Nano Support SLAM Mapping/ Navigation/ Python


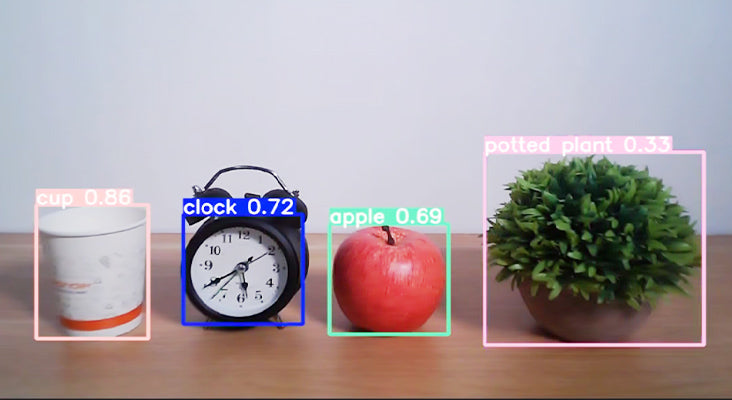
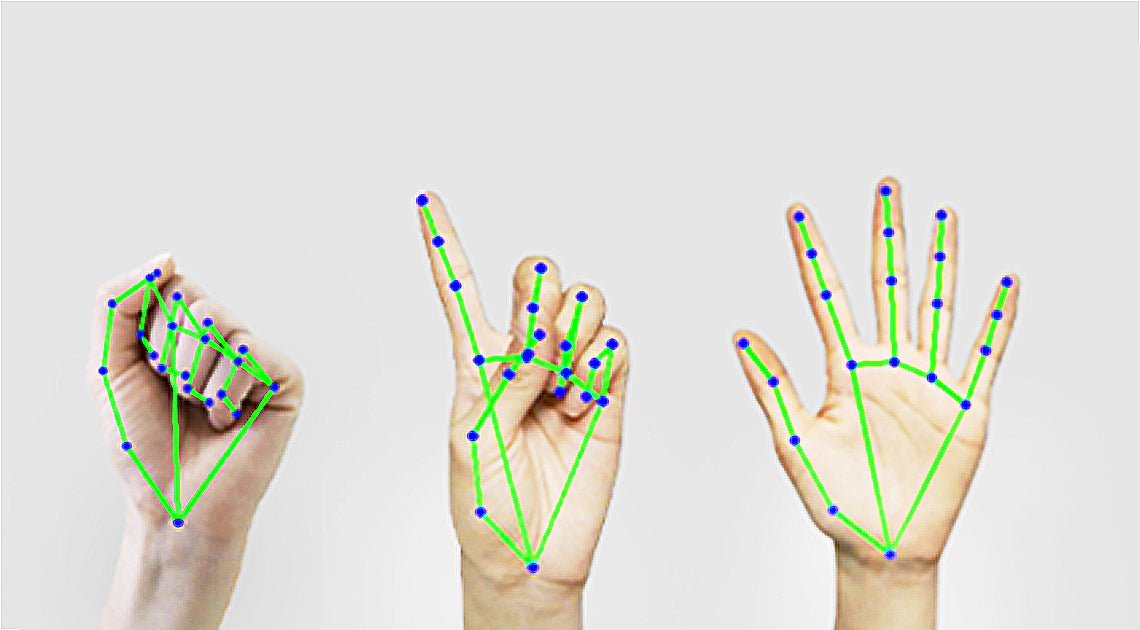
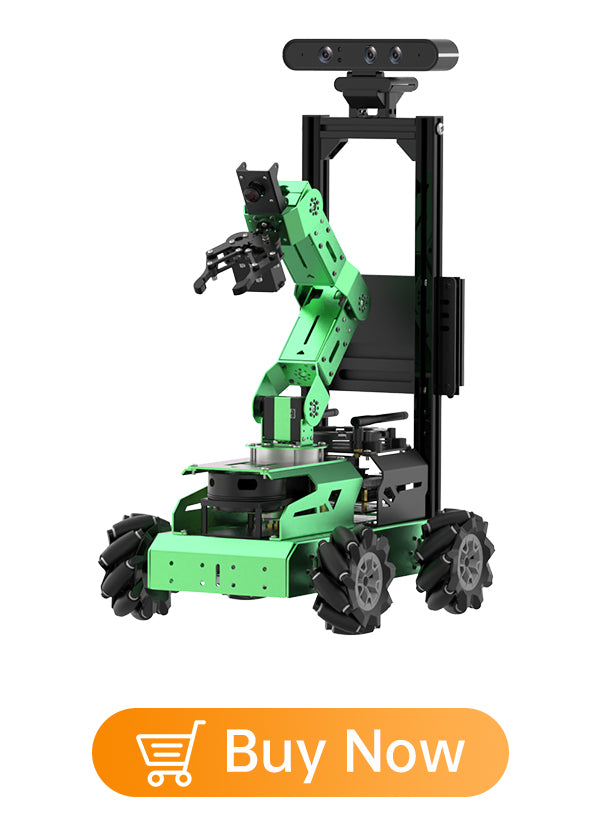
- 【Smart ROS Robots Driven by AI】 JetAuto Pro is a professional robotic platform for ROS learning and development, powered by NVIDIA Jetson Nano and supports Robot Operating System (ROS). It leverages mainstream deep learning frameworks, incorporates MediaPipe development, enables YOLO model training.
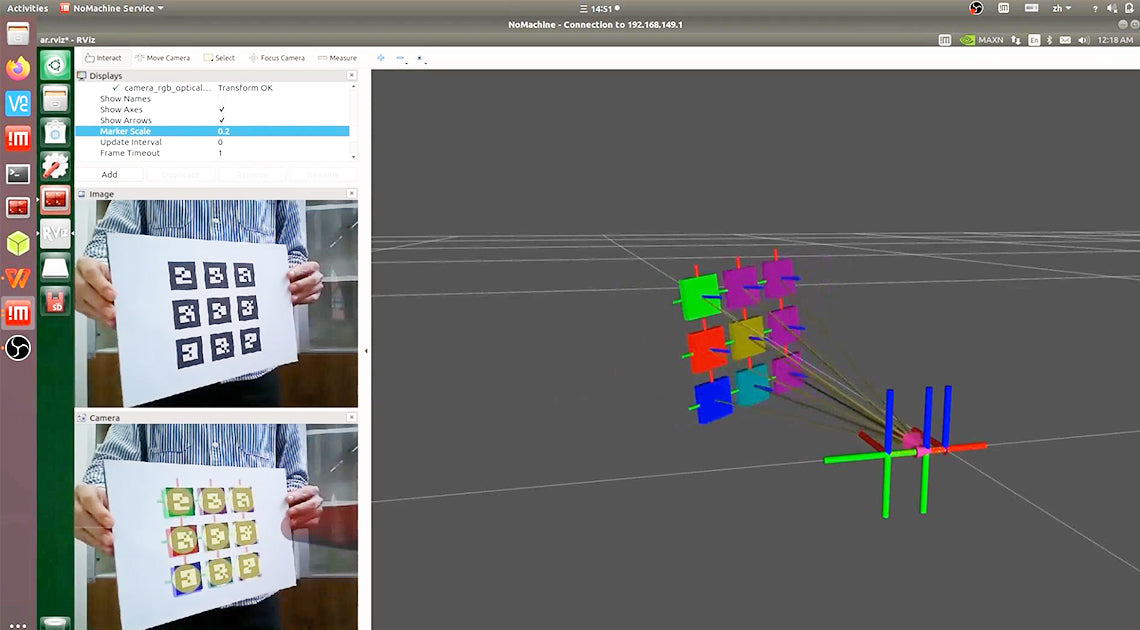
- 【SLAM Development and Diverse Configuration】JetAuto Pro is equipped with a powerful combination of a 3D depth camera and Lidar. It utilizes a wide range of advanced algorithms including gmapping, hector, karto and cartographer, enabling precise multi-point navigation, TEB path planning, and dynamic obstacle avoidance.
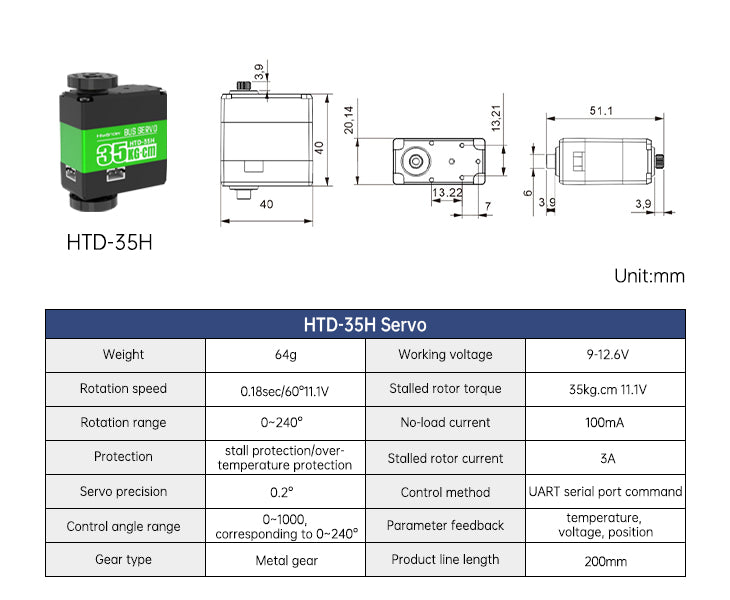
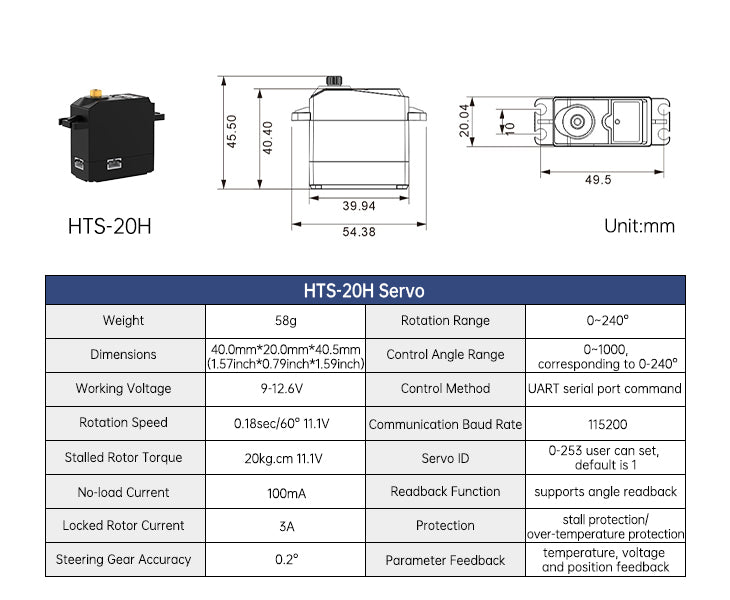
- 【High-performance Vision Robot Arm】JetAuto Pro includes a 6DOF vision robot arm, featuring intelligent serial bus servos with a torque of 35KG. An HD camera is positioned at the end of robot arm, which provides a first-person perspective for object gripping tasks.
- 【Far-field Voice Interaction】JetAuto Pro advanced kit incorporates a 6-microphone array and speaker allowing for man-robot interaction applications, including Text to Speech conversion, 360° sound source localization, voice-controlled mapping navigation, etc. Integrated with vision robot arm, JetAuto Pro can implement voice-controlled gripping and transporting.
- 【Robot Control Across Platforms】JetAuto Pro provides multiple control methods, like WonderAi app (compatible with iOS and Android system), wireless handle, Robot Operating System (ROS) and keyboard, allowing you to control the robot at will.





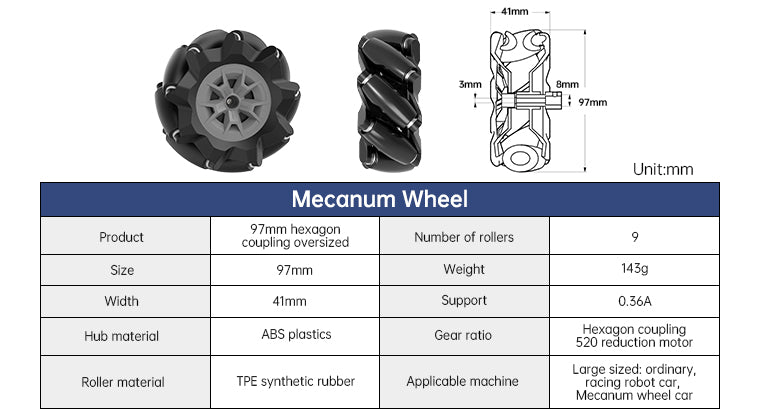
360° Omnidirectional Movement
With 4 omnidirectional mecanum wheels, JetAuto Pro can move 360°. Different movement modes (move forward, horizontally, diagonally and rotate ) and excellent performance make it bold to challenge various complicated routes.

6DOF AI Vision Robot Arm
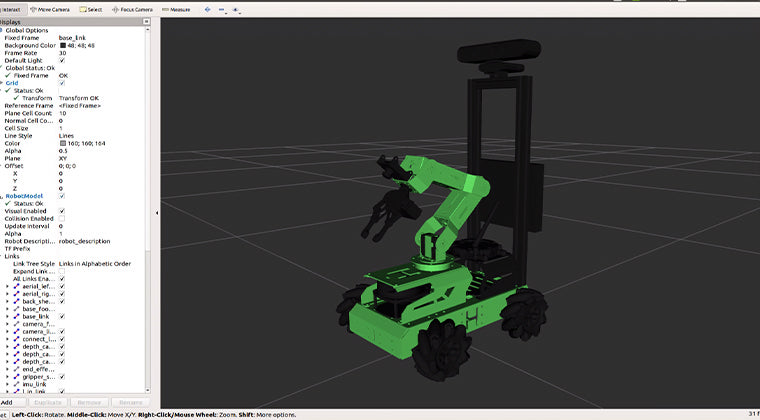
JetAuto Pro is equipped with a 6DOF vision robot arm, which can realize autonomous grabbing, sorting and other functions. Combined with lidar, it can also realize autonomous navigation and transportation.

Equipped with Lidar & Supports SLAM Mapping Navigation
It is driven by an intelligent serial bus servo which provides over-temperature protection and antiblocking function. lts up to 240° rotation range extends JetAuto Pro's exploration ranges.

6CH Far-field Microphone Array
The 6CH Far-field Microphone Array and speakers support sound source positioning, voice recognition control, voice navigation and other functions.







































Wrapped Rear Tail Shell
It can effectively protect the PCB circuit and magnetic ring at the end of the motor from external influences, effectively improving the safety and service life of the motor.

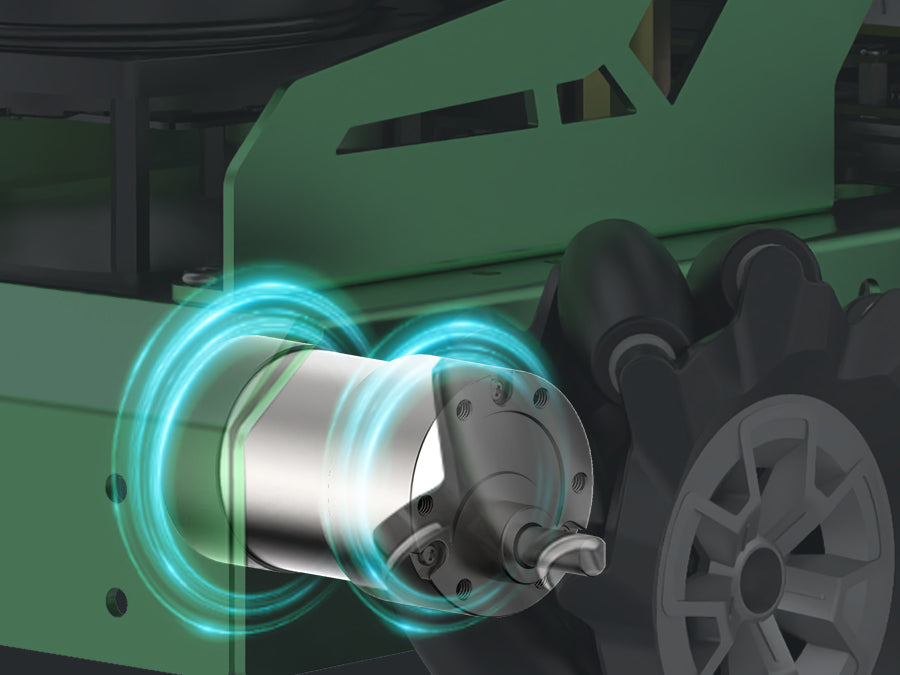
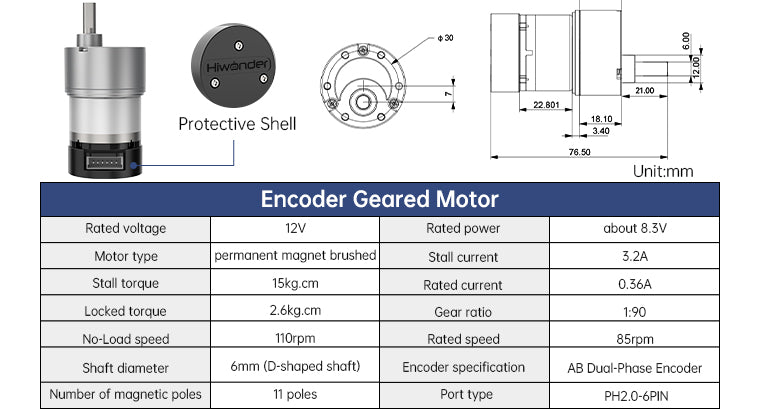
Permanent Magnet Brushed Motor
The permanent magnet DC motor has fast starting response speed, large starting torque and smooth speed change.
High-precision Magnetic Encoder
The motor is equipped with a high-precision magnetic encoder, has strong horsepower, high precision, and strong anti-interference ability.
Adapt to Various Scenes
The low speed of 1:90 ratio and the high torque of 15kg.cm enable the motor to adapt to car chassis made of various materials.




240° High-performance Pan-tilt
JetAuto Pro's high-precision pendulum suspension structure balances the force exerted on all four wheels, enabling good adaptability to uneven surfaces.
DC Geared Motor
lt offers robust force, has a high-precision encoder.and includes a protective end shell to ensure an extended service life.

7-inch HD LCD Touch Screen
The motor is equipped with a high-precision magnetic encoder, has strong horsepower, high precision, and strong anti-interference ability.
Anodized Metal Bracket
Robot's metal bracket is finely anodized for delicate appearance and long service life



|

|

|
|
|
|---|---|---|---|---|
| JetTank | JetAcker | JetAuto | JetAuto Pro | |
| Chassis | Tracked chassis | Ackerman steering structure | Pendulum suspension chassis | Pendulum suspension chassis |
| Wheel | Nylon track | 100mm Solid rubber wheel | 97mm Mecanum wheel | 97mm Mecanum wheel |
| Motor | 520 Motor*2 | 520 Motor*2 | 520 Motor*4 | 520 Motor*4 |
| Servo | Intelligent servo*1 | Intelligent servo*2 | Intelligent servo*1 | Intelligent servo*5 |
| Camera | Astra Pro Plus depth camera | Astra Pro Plus depth camera | Astra Pro Plus depth camera | Astra Pro Plus depth camera and monocular camera |
| Wheel | Nylon track | 100mm Solid rubber wheel | 97mm Mecanum wheel | 97mm Mecanum wheel |
| Lidar | SLAMTEC A1/ EAI G4 | |||
| Robot Arm | / | / | / | Monocular vision robotic arm |
| Features | ROS in-depth development Able to overcome obstacles | Autonomous driving research | Pendulum suspension for stable driving 360° omnidirectional movement | Grabbing and transporting |
| Size: | 324*260*626mm |
| Weight: | 4.8kg |
| Material: | Full-metal hard aluminum alloy bracket (anodized) |
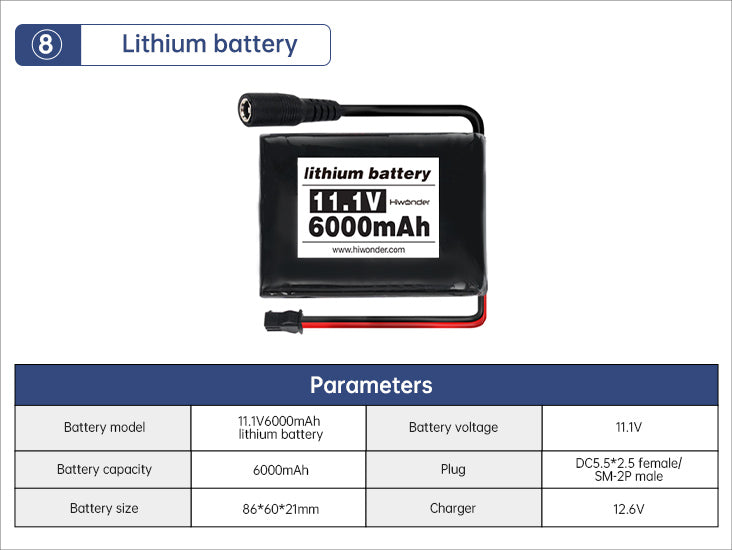
| Battery: | 11.1V 6000mAh Lipo battery |
| Continuous working life: | 60min |
| Hardware: | ROS controller and ROS expansion board |
| Operating system: | Ubuntu 18.04 LTS + ROS Melodic |
| Software: | PC remote control software + iOS/ Android APP |
| Communication: | USB/ WiFi / Ethernet |
| Programming language: | Python/ C/ C++/ JavaScript |
| Storage: | 32GB TF card |
| Servo: | HTS-20H / HTD-35H / HX-12H / HTS-21H |
| Control method: | Phone/ Handle control |
| Package size (advanced kit): | 42*32*25cm |
| Package weight (advanced kit): | About 5.6kg |
















| Item | Specification |
| Size | 324*260*626mm |
| Weight | 4.8kg |
| Material | Full-metal hard aluminum alloy bracket (anodized) |
| Camera resolution | 480P |
| DOF | 6DOF |
| Battery | 11.1V 6000mAh Lipo battery |
| Continuous working life | 60min |
| Hardware | ROS controller and ROS expansion board |
| Operating system | Ubuntu 18.04 LTS + ROS Melodic |
| Software | PC remote control software + iOS/ Android APP |
| Communication | USB/ WiFi / Ethernet |
| Programming language | Python/ C/ C++/ JavaScript |
| Storage | 32GB TF card |
| Servo | HTS-20H / HTD-35H / HX-12H / HTS-21H |
| Control method | Phone/ Handle control |
| Package size | 42*32*25cm |
| Package weight | About 5.6kg |
Customer Reviews
I've worked in the electronics industry for decades but I've only just begun learning Linux and Python and some AI apps. There are a few tutorials on the Nvidia and Hiwonder sites. Some are simple sample files you can run or incorporate code into your instructions while others load up as simple games you can do to show off this kit's abilities. There is a lot to learn to code and work with Robotics. However, till you get there, you can enjoy driving it around and moving its arm with the remote handle or cell phone app.
I can say I ordered this and another robot from Hiwonder and am quite satisfied with this JetAuto Pro. But first I chose another brand of a similar type of robot and an expensive developer kit from another competitor. I found the Hiwonder robot to be superior at just getting started using it. Also both of the other company's kits were missing parts and had broken parts in the kit and sent wrong parts to replace the missing/broken ones which took months to get running. I returned their product and purchased from Hi wonder after that. This robot from Hiwonder came packed very well, 100% complete, with no missing or broken parts. After an hour or two of assembly, I started down the learning path without having to deal with any technical support or hardware issues.

great device, i would suggest the next gen to have e an easier / smarter battery management. it seems the battery is the weak point. the team at hi wonder is amazing and did help me a lot, can’t wait to learn how to use it
This robot car runs very fast. You must give it enough room on the floor. Also the mecanum wheels seem best on hard floors or very low carpet secured to the floor. Deeper carpet or transitioning on\off rugs can cause the mecanum wheels to not drive straight or get hung up.
With the provided source code, i can create my own easily. I think i can learn much for JetAuto :)

Excellent tool to learn robots / robotics. I only used the robot for a few days so far but the robot itself is nice and looks sturdy. The manual gives a lot of detailed explanations and goes really from scratch (e.g. "What's an operating system" ?) to advanced features (e.g. training and deploying a vision model for your applications). For that price, I fully recommend it.
Questions & Answers
Have a Question?
-
Does the robot include the ROS2 upgrade kit, or it needs to be purchased separately?
Hi there, all the kits we ship now support ROS1 and ROS2. System image of ROS1 and ROS2 will be provided with order.
-
Hi where can I find the tutorial download for the advanced JetAuto Pro ROS Robot Car with Vision Robotic Arm Powered by Jetson Nano Support SLAM Mapping/ Navigation/ Python
Pls check this link: https://www.hiwonder.com.cn/store/learn/107.html
-
What is the payload?
About 500g
-
Hello consultant, I have a question. Can I change the length of the joints to be longer than they are now? For example: let the robot arm lengthen by 20 cm with a custom design. Is it possible in the simulation software to edit the teaching point with the new longer arm? One more question, can I replace the motor with a stronger one? thank you very much . If it is inconvenient, you can send it to me via email: binh.kenken@gmail.com
As we haven't test robot arm in the length you require before, we cannot give you a certain answer, but you can have a try.


, Supports AI Vision, Voice Interaction, LiDAR, and Robotic Arm Attachment")
, Supports AI Vision, Voice Interaction, LiDAR, and Robotic Arm Attachment")









, Voice Control, SLAM & AI Vision")
, Voice Control, SLAM & AI Vision")
 Integration, AI Vision, and Voice Interaction")
 Integration, AI Vision, and Voice Interaction")
, AI Vision Tracking, Voice Interaction, and Hand-Eye Coordination")
, AI Vision Tracking, Voice Interaction, and Hand-Eye Coordination")