








, SLAM Mapping/Navigation, AI Voice Interaction, Intelligent Sorting")








, SLAM Mapping/Navigation, AI Voice Interaction, Intelligent Sorting")

Hiwonder JetAuto Pro AI Robot Car with 6DOF Vision Robotic Arm, Support ROS1 ROS2, with Large AI Model (ChatGPT), SLAM Mapping/Navigation, AI Voice Interaction, Intelligent Sorting
【Smart ROS Robots Driven by AI】 JetAuto Pro is a professional robotic platform for ROS learning and development, powered by NVIDIA Jetson / Raspberry Pi 5, and supports Robot Operating System (ROS2 & ROS1). It leverages mainstream deep learning frameworks, incorporates MediaPipe development, and enables YOLO model training.
【SLAM Development and Diverse Configuration】 JetAuto Pro is equipped with a powerful combination of a 3D depth camera and Lidar. It utilizes a wide range of advanced algorithms, including gmapping, Hector, Karto, and Cartographer, enabling precise multi-point navigation, TEB path planning, and dynamic obstacle avoidance.
【 High-Performance Vision Robot Arm】 JetAuto Pro features a 6DOF vision robot arm, equipped with intelligent serial bus servos that deliver a torque of 35 kg. An HD camera is positioned at the end of robot arm, which provides a first-person perspective for object gripping tasks.
【Far-field Voice Interaction】 JetAuto Pro advanced kit incorporates a 6-microphone array and speaker allowing for man-robot interaction applications, including Text to Speech conversion, 360° sound source localization, voice-controlled mapping navigation, etc. Integrated with vision robot arm, JetAuto Pro can implement voice-controlled gripping and transporting.
【Robot Control Across Platforms】 JetAuto Pro provides multiple control methods, like WonderAi app (compatible with iOS and Android systems), wireless controller, Robot Operating System (ROS) and keyboard, allowing you to control the robot at will.
【Empowered by Large Al Model, Human-Robot Interaction Redefined】 JetAuto Pro deploys AI multimodal models with ChatGPT at its core, integrating 3D vision and a 6-microphone array. This synergy enhances its perception, reasoning, and actuation capabilities, enabling advanced embodied AI applications and delivering natural, context-aware human-robot interaction.


For Hiwonder JetAuto Pro tutorials you can check: https://docs.hiwonder.com/projects/JetAuto/en/jetauto-orin-nano/.




JetAuto Pro also deploys a Multimodal Large AI Model to support more advanced embodied AI applications. To help you unlock its full potential, we offer open-source code and learning resources to inspire and support your AI projects.

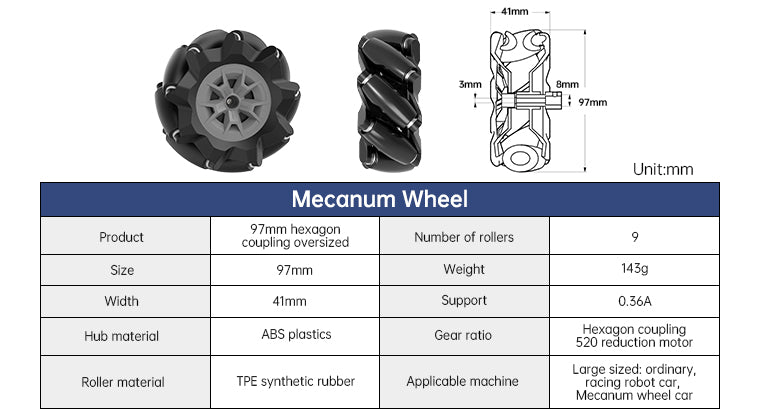
360° Omnidirectional Movement
With 4 omnidirectional mecanum wheels, JetAuto Pro can move 360°. Different movement modes (move forward, horizontally, diagonally and rotate ) and excellent performance make it bold to challenge various complicated routes.

Dual-Camera Intelligent Coordination
JetAuto Pro is equipped with a 3D depth camera and a monocular camera on the robot arm, enabling the robot to perceive 3D spatial information and achieve hand-eye coordination for precise grasping.

LiDAR SLAM Mapping Navigation
JetAuto Pro is equipped with lidar, which can realize SLAM mapping and navigation, and supports path planning, fixed-point navigation and dynamic obstacle avoldance.

6CH Far-field Microphone Array
The 6CH Far-field Microphone Array and speakers support sound source positioning, voice recognition control, voice navigation and other functions.


























































Wrapped Rear Tail Shell
It can effectively protect the PCB circuit and magnetic ring at the end of the motor from external influences, effectively improving the safety and service life of the motor.

Permanent Magnet Brushed Motor
The permanent magnet DC motor has fast starting response speed, large starting torque and smooth speed change.
High-precision Magnetic Encoder
The motor is equipped with a high-precision magnetic encoder, has strong horsepower, high precision, and strong anti-interference ability.
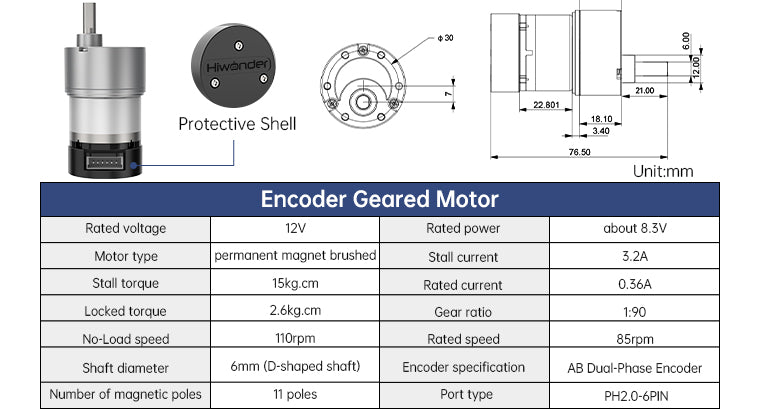
Adapt to Various Scenes
The low speed of 1:90 reduction ratio and the high torque of 15kg.cm enable the motor to adapt to car chassis made of various materials.







240° High-performance Pan-tilt
JJetAuto Pro's high-precision pendulum suspension structure balances the force exerted on all four wheels, enabling good adaptability to uneven surfaces.

6DOF AI Vision Robot Arm
JetAuto Pro is equipped with a 6DOF vision robot arm, which can realize autonomous grabbing, sorting and other functions. Combined with lidar, it can also realize autonomous navigation and transportation.

7-inch HD LCD Touch Screen
With a resolution of 1024 x 600 pixels and compatible with NVIDIA, this screen allows you to freely monitor and debug various parameters of robot.

Anodized Metal Bracket
Robot's metal bracket is finely anodized for delicate appearance and long service life


| Size: | 32.4*26*62.6cm |
| Weight: | 4.8kg |
| Material: | Full-metal hard aluminum alloy bracket (anodized) |
| Battery: | 11.1V 6000mAh Lipo battery |
| Continuous working life: | 60min |
| ROS controller: | Jetson Nano / Jetson Orin Nano / Jetson Orin NX / Raspberry Pi 5 |
| Operating system: | Ubuntu 18.04 LTS + ROS Melodic / Ubuntu22.04 + ROS2 humble |
| Software: | PC remote control software + iOS/ Android APP |
| Communication: | USB/ WiFi / Ethernet |
| Programming language: | Python/ C/ C++/ JavaScript |
| Storage: | 64GB TF card(Jetson Nano/Raspberry Pi) / 128GB Solid State Drive(Jetson Orin Nano/NX) |
| Servo: | HTS-20H / HTD-35H / HX-12H / HTS-21H intelligent serial bus servo |
| Control method: | Phone/ Wireless control |
| Package size (advanced kit): | 42*32*25cm(length*width*height) |
| Package weight (advanced kit): | About 5.6kg |








| Item | Specification |
| Size | 32.4*26*62.6cm |
| Weight | 4.8kg |
| Material | Full-metal hard aluminum alloy bracket (anodized) |
| Battery | 11.1V 6000mAh Lipo battery |
| Continuous working life | 60min |
| ROS controller | Jetson Nano / Jetson Orin Nano / Jetson Orin NX / Raspberry Pi 5 |
| Operating system | Ubuntu 18.04 LTS + ROS Melodic / Ubuntu22.04 + ROS2 humble |
| Software | PC remote control software + iOS/ Android APP |
| Communication | USB/ WiFi / Ethernet |
| Programming language | Python/ C/ C++/ JavaScript |
| Storage | 64GB TF card(Jetson Nano/Raspberry Pi) / 128GB Solid State Drive(Jetson Orin Nano/NX) |
| Servo | HTS-20H / HTD-35H / HX-12H / HTS-21H intelligent serial bus servo |
| Control method | Phone/ Wireless control |
| Package size (advanced kit) | 42*32*25cm(length*width*height) |
| Package weight (advanced kit) | About 5.6kg |
Shipping & Delivery
1. Free Shipping Policy
Hiwonder offers free standard shipping on orders over US $499 (before tax and duties), delivered via trusted carriers such as DHL, UPS, or FedEx.
Most orders arrive within 6 working days after dispatch. You can check if your country is eligible for free shipping in the regions listed below.
Eligible Regions
- Americas: United States, Canada, Mexico, Chile
- Europe: Germany, United Kingdom, Netherlands, Switzerland, France, Austria, Italy, Belgium, Spain, Sweden, Finland, Norway, Portugal, Czech Republic, Poland, Greece, Slovenia, Romania, Denmark, Bulgaria, Luxembourg, Slovakia, Hungary, Ireland, Estonia, Lithuania
- Asia: China, Japan, Singapore, South Korea, United Arab Emirates, Malaysia, Thailand, Philippines, Indonesia
- Oceania: Australia, New Zealand
If your country or region is not listed above, the shipping cost will be automatically calculated at checkout once you enter your shipping address.
2. Customs & Import Fees
All international shipments are subject to local customs regulations. Import duties, taxes, or other fees may be charged by your country's customs authority upon arrival.
Our shipping term is FOB Shenzhen, which means these fees, if any, are the customer's responsibility. The shipping carriers will assist with the customs clearance process to ensure smooth delivery.
If a package is returned due to unpaid customs duties, any related return or reshipping fees will be deducted from your refund.
3. Order Processing Time
Orders are typically processed within 24 hours after placement and shipped the next business day.
Orders placed on weekends or public holidays will be shipped on the next working day.
Once shipped, you will receive a confirmation email with tracking information.


Questions & Answers
Have a Question?
-
Do you need to remove the battery to recharge it, like you do with the MasterPi robot? If not, can you run the robot while the power is connected? Ideally I would like a robot with auto docking capability so it can recharge itself.
Hi there, you dont need to remove the battery to chagre it. We will suggest you to order one more spare battery with the kit so that you can change the battery directly. If you need more batteries, pls contact us. Email: support@hiwonder.com
-
Does the robot include the ROS2 upgrade kit, or it needs to be purchased separately?
Hi there, all the kits we ship now support ROS1 and ROS2. System image of ROS1 and ROS2 will be provided with order.
-
Hi where can I find the tutorial download for the advanced JetAuto Pro ROS Robot Car with Vision Robotic Arm Powered by Jetson Nano Support SLAM Mapping/ Navigation/ Python
Pls check this link: https://www.hiwonder.com.cn/store/learn/107.html
-
What is the payload?
About 500g
-
Hello consultant, I have a question. Can I change the length of the joints to be longer than they are now? For example: let the robot arm lengthen by 20 cm with a custom design. Is it possible in the simulation software to edit the teaching point with the new longer arm? One more question, can I replace the motor with a stronger one? thank you very much . If it is inconvenient, you can send it to me via email: binh.kenken@gmail.com
As we haven't test robot arm in the length you require before, we cannot give you a certain answer, but you can have a try.


, Supports AI Vision, Voice Interaction, LiDAR, and Robotic Arm Attachment")
, Supports AI Vision, Voice Interaction, LiDAR, and Robotic Arm Attachment")





, Vision AI, Interactive Voice Response, and Hand-Eye Coordination")
, Vision AI, Interactive Voice Response, and Hand-Eye Coordination")







