















Hiwonder JetAuto ROS1 ROS2 Robot Car Powered by Jetson Nano with Lidar Depth Camera Touch Screen, Support SLAM Mapping and Navigation


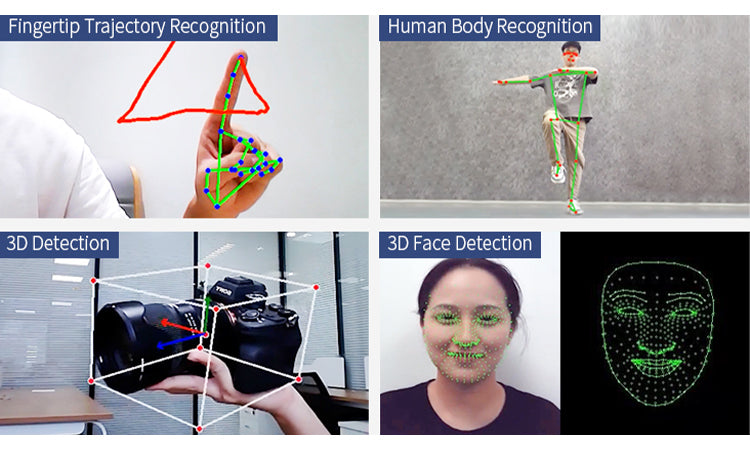
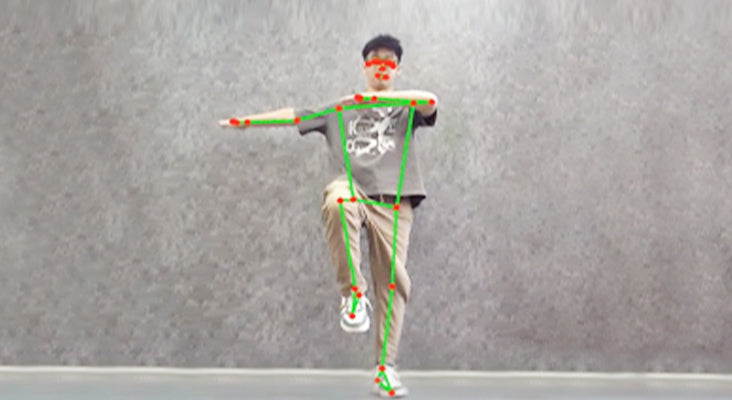
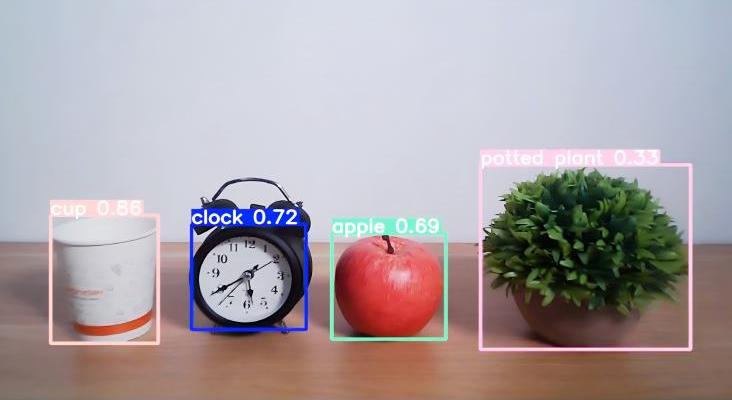
- 【Smart ROS Robots Driven by AI】JetAuto supports Robot Operating System (ROS). It leverages mainstream deep learning frameworks, incorporates MediaPipe development, enables YOLO model training, and utilizes TensorRT acceleration. This combination delivers a diverse range of 3D machine vision applications, including autonomous driving, human feature recognition, and KCF target tracking.
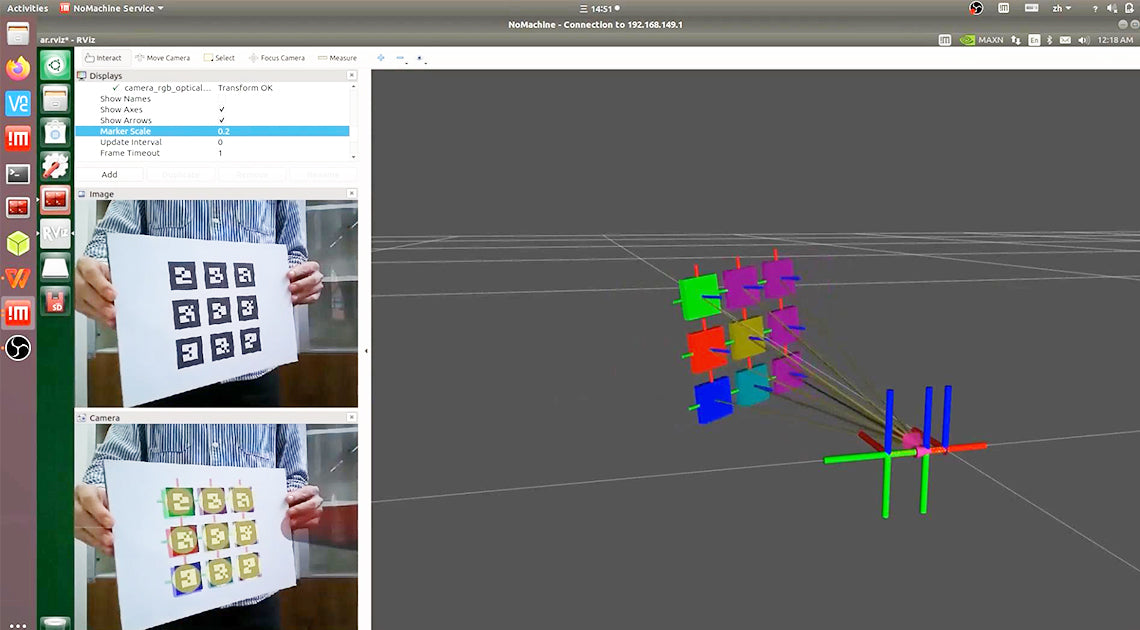
- 【SLAM Development and Diverse Configuration】JetAuto is equipped with a powerful combination of a 3D depth camera and Lidar. It utilizes a wide range of advanced algorithms including gmapping, hector, karto, cartographer and RRT, enabling precise multi-point navigation, TEB path planning, and dynamic obstacle avoidance. Using 3D vision, it can capture point cloud images of the environment to achieve RTAB 3D mapping navigation.
- 【Far-field Voice Interaction】JetAuto advanced kit incorporates a 6-microphone array and speaker allowing for fascinating man-robot interaction applications, including Text to Speech conversion, voice wake-up, 360° sound source localization, offline voice recognition, voice-controlled mapping navigation, etc.
- 【Robot Control Across Platforms】JetAuto provides multiple control methods, like WonderAi app (compatible with iOS and Android system), wireless handle, Robot Operating System (ROS) and keyboard, allowing you to control the robot at will. By importing corresponding codes, you can command JetAuto to perform specific actions. Please note that navigation app is exclusively available for Android system.







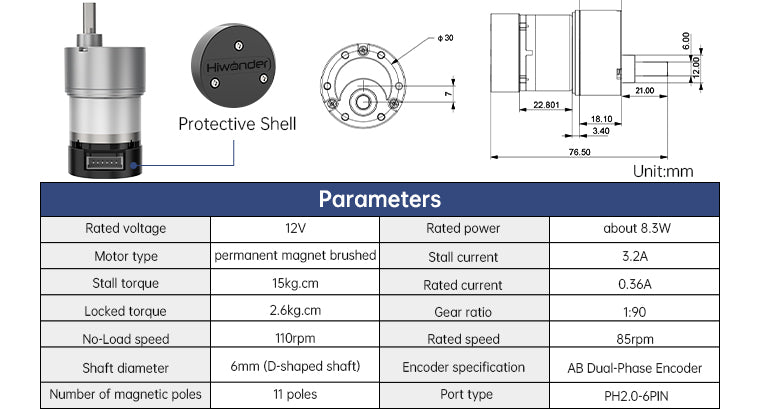
DC Geared Motor
It offers robust force, has a high-precision encoder,and includes a protective end shell to ensure an extended service life.

7-inch HD LCD Touch Screen
With a resolution of 1024 x 600 pixels and compatible with NVIDIA, this screen allows you to freely monitor and debug various parameters of the robot.

240° High-performance Pan-tilt
JetAuto's high-precision pendulum suspension structure balances the force exerted on all four wheels, enabling good adaptability to uneven surfaces.

6CH Far-field Microphone Array
The 6-channel microphone array and speakers support sound source positioning, voice recognition control, voice navigation and other functions.



































Wrapped Rear Tail Shell
It can effectively protect the PCB circuit and magnetic ring at the end of the motor from external influences, effectively improving the safety and service life of the motor.
Permanent Magnet Brushed Motor
The permanent magnet DC motor has fast starting response speed, large starting torque and smooth speed change.

High-precision Magnetic Encoder
The motor is equipped with a high-precision magnetic encoder, has strong horsepower, high precision, and strong anti-interference ability.

Adapt to Various Scenes
The low speed of 1:90 ratio and the high torque of 15kg.cm enable the motor to adapt to car chassis made of various materials.





|

|

|
|
|
|---|---|---|---|---|
| JetTank | JetAcker | JetAuto | JetAuto Pro | |
| Chassis | Tracked chassis | Ackerman steering structure | Pendulum suspension chassis | Pendulum suspension chassis |
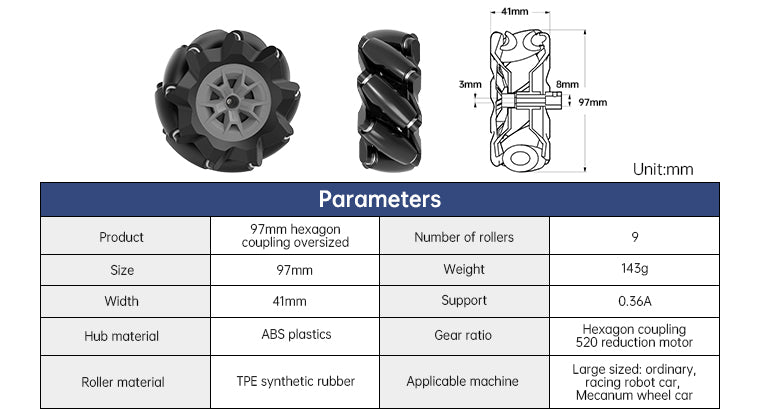
| Wheel | Nylon track | 100mm Solid rubber wheel | 97mm Mecanum wheel | 97mm Mecanum wheel |
| Motor | 520 Motor*2 | 520 Motor*2 | 520 Motor*4 | 520 Motor*4 |
| Servo | Intelligent servo*1 | Intelligent servo*2 | Intelligent servo*1 | Intelligent servo*5 |
| Camera | Astra Pro Plus depth camera | Astra Pro Plus depth camera | Astra Pro Plus depth camera | Astra Pro Plus depth camera and monocular camera |
| Lidar | SLAMTEC A1/ EAI G4 | |||
| Robot Arm | / | / | / | Monocular vision robotic arm |
| Features | ROS in-depth development Able to overcome obstacles | Autonomous driving research | Pendulum suspension for stable driving 360° omnidirectional movement | Grabbing and transporting |
| Size: | 302*260*256mm |
| Weight: | 3500g |
| Material: | Full-metal hard aluminum alloy bracket |
| Battery: | 11.1V 6000mAh lithium battery |
| Continuous working life: | 60min |
| Hardware: | ROS controller and ROS expansion board |
| Operating system: | Ubuntu 18.04 LTS + ROS Melodic |
| Software: | iOS/ Android APP |
| Communication: | USB/ WiFi / Ethernet |
| Programming language: | Python/ C/ C++/ JavaScript |
| Storage: | 32GB TF card |
| Servo: | HTS-20H serial bus servo |
| Control method: | Phone/ Handle control |
| Package size (advanced kit): | 34*32*23cm |
| Package weight (advanced kit): | About 4.5kg |


















| Item | Specification |
| Size | 302*260*256mm |
| Product weight | 3500g |
| Material | Full-metal hard aluminum alloy bracket (anodized) |
| Battery | 11.1V 6000mAh Lipo battery |
| Continuous working life | 60min |
| Hardware | ROS controller and ROS expansion board |
| Operating system | Ubuntu 18.04 LTS + ROS Melodic |
| Software | iOS/ Android app |
| Communication | USB/ WiFi / Ethernet |
| Programming language | Python/ C/ C++/ JavaScript |
| Storage | 32GB TF card |
| Servo | HTS-20H serial bus servo |
| Control method | Phone/ Handle control |
| Package size (advanced kit) | 34*32*23cm |
| Package weight (advanced kit) | About 4.5kg |
Customer Reviews
This is a great robot kit. The build materials are high quality and the compatibility with Jetson Nano makes it very programable and a nice teaching tool for students.

I honestly can't believe what a good job Hiwonder did with this robot. I am not paid or getting anything for this review. The robot was extremely well put together and the wiring management was top notch. Everything advertised by Hiwonder aboiut this robot is 100% true. I can't really think of any negatives - it wasn't cheap but it was worth it. The screen is awesome, the camera is reall really really good - the price is not cheap but you really are getting what you pay for. One piece of advice i would give is if you are new to Robotics like me, take your time to really learn an understand the various systems. I also bought the TonyPi Pro, the Spiderbot Pro and the Amrpi Pro - all of them awesome....tempted on the PuppyPi Pro!! :-)
There are plenty of tutorials, videos, and software that can be downloaded from the homepage, which are very useful for learning AI computing.
1, Functions of robot, very good as it includes
1, APP control with iphone, which is easy to start learning.
2, remote control via PC with NoMachine, which makes easy operation.
3, sereral types of AI, SLAM and path planning algo etc.,
2, Sales support is fast and quick. Receipt service and shipping was smooth.
The car is amazing but if the charge core is not on bottom of the car,it can easy for charging.
Questions & Answers
Have a Question?
-
where do we get 3d models of these parts
Hello, please share your order number to support@hiwonder.com, and our team will provide you with the file
-
do you deliver to davao city, philippines?
Yes, you can directly place order on our official website:)
-
Hi, What is the "Hiwonder JetAuto ROS1 ROS2 Robot Car Powered by Jetson Nano with Lidar Depth Camera Touch Screen, Support SLAM Mapping and Navigation" used for? I mean, after learning all that is mentioned on the product page, i.e. (Robot Underlying Function, Mapping Navigation Functions, Vision Processing Functions, etc.) - how do I use all that learning? Are all these learnings used for a job, a hobby, or to start a robotics company? I am totally clueless about the real-life use cases of what I learned from this product. Can you please guide me on this? Thank you. Furthermore, do you have any Google Drive links with tutorials?
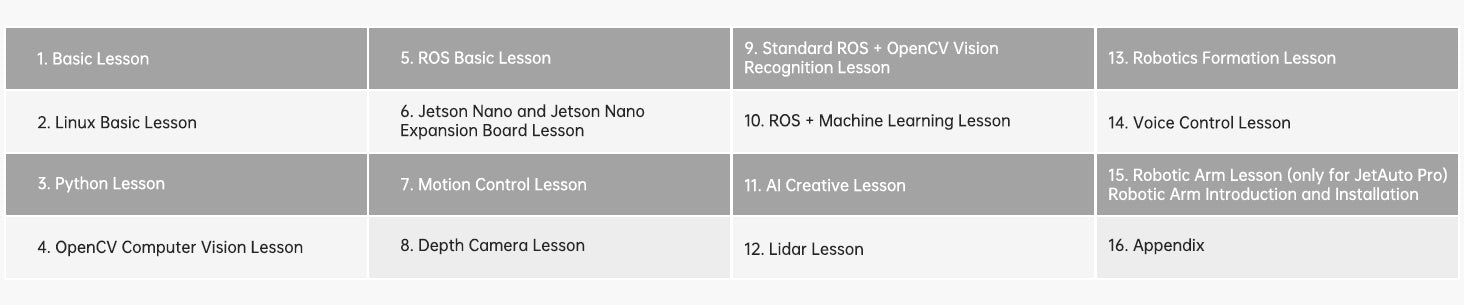
It is primarily used for Python programming education. For more details, refer to the section "What Can You Learn?" You can also access the detailed tutorial through the following link: https://drive.google.com/drive/folders/1AdtGPZs15ZxV2N0FR-1v13G8QhGK1Lry?usp=sharing
-
Hi, I'd like to know what's the payload for this robot car?
Hello,
We apologize, but unfortunately, we don't have the specific data you're looking for at this time.
-
hi i need the image for jetson nano 4GB to start with my robot (mecanum wheels chasiss)
Hi there, pls contact our support email with your order number. We will provide the image asap.
-
Since Ubuntu 18.04 is not supported after 2023, how should we program this robot? Is ROS noetic support this robot?
No worries, Ubuntu 18.04 is still availble and can program. JetAuto adopts docker.
-
Hi there, what would be the maximum linear speed of the robot (m/s).
Hi there! It's around 0.7 m/s
-
Would it be possible to extend this with connectivity to an AI API (like ChatGPT) to not only allow basic chat control but also full text to speech output for conversation with the AI. If so what would the basic approach be?
Our other customers have successfully connect the JetAuto to ChatGPT, so JetAuto is compatible. Since this belongs secondary development, we cannot provide any suggestion. We appreciate your understanding to this matter. Thank you!
-
Are there videos or explanations of how to implement this robot in detail?
Yes, you can find the videos in this link: https://www.youtube.com/playlist?list=PLFbzd0m6AcmIKG3E_Nso9wvjIfMpvkOH2
-
Hi, I just received the package few days ago, i just wonder if we can use intel Realsense instead of Astra? how can we connect other 3D Camera to JetAuto? i suppose that we need to modify the code of program to re-define camera. Is there any forum or further docs to do some more with JetAtuo. Thanks,
Yes, you can change the depth camera, but please note that there is no related documents available:(
-
Hi I am a researcher at York University in Toronto, Canada. I am interested in your product "Hiwonder JetAuto" for a use in multi-robot configurations. In this context, I want to have more details on the communication architectures that are possible through WIFI. Can we stablish decentralized talking, where each robot can individually and independently talk to a neigboring robot without having to route the message through a WIFI router ???? I noticed each vehicle is equipped with antennas, do you think we can make the antennas exchange signals directly without linking to a central router ? If not then routing all the vehicles through a central router within a standard WIFI network to establish communications is required, in that case, what do you recommend to manage communication protocols and priorities for multiple robots talking simultaneously ? Do you have a custom solution ? Thank you very much.
Under AP direct connection mode, it is possible to interconnect multiple JetAutos. However, it is important to note that the quality of the connection may not be as optimal as when using a router. In order to ensure efficient multi-robot control and formation, we typically utilize ROS distributed communication. This application necessitates a high-quality communication bandwidth. Therefore, we recommend using a router for optimal performance and reliable operation.


, Supports AI Vision, Voice Interaction, LiDAR, and Robotic Arm Attachment")
, Supports AI Vision, Voice Interaction, LiDAR, and Robotic Arm Attachment")









 Integration, AI Vision, and Voice Interaction")
 Integration, AI Vision, and Voice Interaction")

