




















Hiwonder ROSOrin ROS2 Smart Car, Multimodal Large AI Model ChatGPT / Gemini / Grok / Llama, SLAM Navigation Programming, Mecanum Wheels Robot
【ROS2 & High-Performance Hardware】 ROSOrin runs on ROS2, compatible with Jetson and Raspberry Pi. It features LiDAR, a 3D camera, and a six-microphone array for tasks like mapping and navigation, 3D recognition, and voice interaction.
【Multimodal Large AI Model & OpenClaw】 Multimodal large AI model deployment and deep OpenClaw agent integration unlock advanced embodied intelligence. This enables cross-platform collaboration, proactive responsiveness, and spatial vector memory for advanced robotic applications.
【Versatile Chassis Expansion】 Switches between Mecanum, Ackermann, and differential drive chassis, paired with a swing arm suspension system for stable movement and precise control on complex terrains.
【AI Vision Algorithms】 Equipped with YOLO26, OpenCV, MediaPipe, and KCF algorithms, ROSOrin delivers powerful visual perception for advanced applications like autonomous driving, face recognition, and target tracking.
【Learning Resources】 Includes comprehensive tutorials, source code, and AI project examples from beginner to advanced, everything needed to move from first build to advanced ROS robot applications.


Check your ROSOrin Tutorials here: https://docs.hiwonder.com/projects/ROSOrin/en/jetson-orin-nano-version/.


Supporting hybrid online/local deployment, ROSOrin integrates multimodal large AI models with the OpenClaw agent framework. Its robust autonomy drives seamless natural voice interaction, scene understanding, and cross-platform collaboration. By unlocking advanced embodied intelligence applications—including information aggregation, proactive responsiveness, low-level dynamic invocation, and spatial vector memory—the platform serves as an ideal foundation for ROS development and AI robotics.







3D Depth Camera
The 3D depth camera can not only realize AI visual game-play, but also enable advanced gameplay such as depth image data processing and 3D visual mapping navigation.

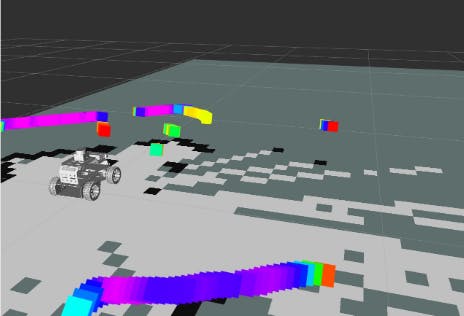
STL-19P D500 TOF Lidar
ROSOrin is equipped with Lidar, which can realize SLAM mapping and navigation, and supports path planning, fixed-point navigation and dynamic obstacle avoidance.

ROS Control System
ROS Control allows you to run multiple neural networks, object detection, segmentation and speech processing applications in parallel.

6-Ch Far-field Microphone Array
The 6-Ch far-field microphone array and speakers support sound source positioning, voice recognition control, voice navigation and other functions.












Integrated SLAM Mapping & Navigation




























| Aurora930 Pro Specifications | |||||
| Module parameter | Size | 76.5 × 20.7 × 21.8 mm | Imaging performance | Depth data format | 16-bit Raw |
| Baseline | 40mm | Depth resolution/Frame rate | 640×400 @12fps (FOV: 74°×51°) | ||
| Interface | USB 2.0 Wafer connector | RGB data format | NV12 | ||
| Depth accuracy | ±8mm @1m | RGB resolution /Frame rate | 640×400 @12fps (FOV: 74°×51°) | ||
| Working distance | 15–300 cm | IR data format | 8-bit Raw | ||
| Operating temperature | -10℃ to 55℃ | IR resolution /Frame rate | 640×400 @12fps (FOV: 74°×51°) | ||
| Operating humidity | 0% to 95% RH (non-condensing) | Firmware capabilities | Firmware upgrade | Supports USB OTA Update | |
| Operating illuminance | 3–80,000 Lux | Hot start delay | <300ms | ||
| Power supply | 5V±10%, 1.5A | System compatibility | OS compatibility | Linux / ARMv8 / ROS / Windows | |
| Power consumption | Average <1.6W | ||||
| Safety rating | Class 1 Laser safety | ||||
| Aurora930 Pro Specifications | ||
| Module parameter | Size | 76.5 × 20.7 × 21.8 mm |
| Baseline | 40mm | |
| Interface | USB 2.0 Wafer connector | |
| Depth accuracy | ±8mm @1m | |
| Working distance | 15–300 cm | |
| Operating temperature | -10℃ to 55℃ | |
| Operating humidity | 0% to 95% RH (non-condensing) | |
| Operating illuminance | 3–80,000 Lux | |
| Power supply | 5V±10%, 1.5A | |
| Power consumption | Average <1.6W | |
| Safety rating | Class 1 Laser safety | |
| Imaging performance | Depth data format | 16-bit Raw |
| Depth resolution/Frame rate | 640×400 @12fps (FOV: 74°×51°) | |
| RGB data format | NV12 | |
| RGB resolution /Frame rate | 640×400 @12fps (FOV: 74°×51°) | |
| IR data format | 8-bit Raw | |
| IR resolution /Frame rate | 640×400 @12fps (FOV: 74°×51°) | |
| Firmware capabilities | Firmware upgrade | Supports USB OTA Update |
| Hot start delay | <300ms | |
| System compatibility | OS compatibility | Linux / ARMv8 / ROS / Windows |











Wrapped Rear Tail Shell
It can effectively protect the PCB circuit and magnetic ring at the end of the motor from external influences, effectively improving the safety and service life of the motor.
Permanent Magnet Brushed Motor
The permanent magnet DC motor has fast starting response speed, large starting torque and smooth speed change.

High-precision Magnetic Encoder
The motor is equipped with a high-precision magnetic encoder, has strong horsepower, high precision, and strong anti-interference ability.

Adapt to Various Scenes
The low speed of 1:90 ratio and the high torque of 15kg.cm enable the motor to adapt to car chassis made of various materials.





| Machine model | Mecanum chassis version (Standard) | Ackerman chassis version (Standard) | Four-Wheel Differential Chassis Version (Standard) |
| Product dimensions | 277x212x166mm | 277x204x169mm | 277x204x166mm |
| Product weight | 2.66kg | 2.15kg | 2.26kg |
| Motor | 520 metal gear reduction motor | ||
| Encoder | High-precision AB quadrature encoder | ||
| Chassis material | Full-metal aluminum alloy chassis with anodized finish | ||
| ROS controller | Jetson Nano / Jetson Orin Nano / Jetson Orin NX / Raspberry Pi 5 board | ||
| Multi-function expansion board | STM32 ROS robot controller, Jetson multi-function expansion board | ||
| Control method | App control, wireless controller control, PC software control | ||
| Depth camera | Aurora 930 Pro 3D depth camera | ||
| LiDAR | STL-19P D500 TOF LiDAR | ||
| Battery | 11.1V 6000mAh 3C lithium battery | ||
| Audio/pickup | WonderEcho Pro Al voice interaction box / 6-mic array module | ||
| Operating system | Ubuntu 18.04 LTS + ROS Melodic / Ubuntu 22.04 / ROS2 Humble | ||
| Software | iOS / Android app | ||
| Communication method | WiFi / Ethernet | ||
| Programming tools | Python / C / C++ / JavaScript | ||
| Storage | 64G TF card (Jetson Nano, Raspberry Pi 5) 128G SSD (Jetson Orin Nano, Jetson Orin NX) | ||
| Servo model | LD-1501MG | ||
| Map/Props | AI sandbox map for autonomous driving, traffic lights, road signs | ||
| Tutorials | Comprehensive tutorials, ROS source code, system image, supporting software | ||
| Mecanum chassis version (Standard) | Size: 277x212x166mm Weight: 2.66kg |
| Ackerman chassis version (Standard) | Size: 277x204x169mm Weight: 2.15kg |
| Four-Wheel Differential Chassis Version (Standard) | Size: 277x204x166mm Weight: 2.26kg |
| Motor | 520 metal gear reduction motor |
| Encoder | High-precision AB quadrature encoder |
| Chassis material | Full-metal aluminum alloy chassis with anodized finish |
| ROS controller | Jetson Nano / Jetson Orin Nano / Jetson Orin NX / Raspberry Pi 5 board |
| Multi-function expansion board | STM32 ROS robot controller, Jetson multi-function expansion board |
| Control method | App control, wireless controller control, PC software control |
| Depth camera | Aurora 930 Pro 3D depth camera |
| LiDAR | STL-19P D500 TOF LiDAR |
| Battery | 11.1V 6000mAh 3C lithium battery |
| Audio/pickup | WonderEcho Pro Al voice interaction box / 6-mic array module |
| Operating system | Ubuntu 18.04 LTS + ROS Melodic / Ubuntu 22.04 / ROS2 Humble |
| Software | iOS / Android app |
| Communication method | WiFi / Ethernet |
| Programming tools | Python / C / C++ / JavaScript |
| Storage | 64G TF card (Jetson Nano, Raspberry Pi 5) 128G SSD (Jetson Orin Nano, Jetson Orin NX) |
| Servo model | LD-1501MG |
| Map/Props | AI sandbox map for autonomous driving, traffic lights, road signs |
| Tutorials | Comprehensive tutorials, ROS source code, system image, supporting software |



| Item | Specification |
| Mecanum chassis version (Standard) | Size: 277x212x166mm Weight: 2.66kg |
| Ackerman chassis version (Standard) | Size: 277x204x169mm Weight: 2.15kg |
| Four-Wheel Differential Chassis Version (Standard) | Size: 277x204x166mm Weight: 2.26kg |
| Motor | 520 metal gear reduction motor |
| Encoder | High-precision AB quadrature encoder |
| Chassis material | Full-metal aluminum alloy chassis with anodized finish |
| ROS controller | Jetson Nano / Jetson Orin Nano / Jetson Orin NX / Raspberry Pi 5 board |
| Multi-function expansion board | STM32 ROS robot controller, Jetson multi-function expansion board |
| Control method | App control, wireless controller control, PC software control |
| Depth camera | Aurora 930 Pro 3D depth camera |
| LiDAR | STL-19P D500 TOF LiDAR |
| Battery | 11.1V 6000mAh 3C lithium battery |
| Audio/pickup | WonderEcho Pro Al voice interaction box / 6-mic array module |
| Operating system | Ubuntu 18.04 LTS + ROS Melodic / Ubuntu 22.04 / ROS2 Humble |
| Software | iOS / Android app |
| Communication method | WiFi / Ethernet |
| Programming tools | Python / C / C++ / JavaScript |
| Storage | 64G TF card (Jetson Nano, Raspberry Pi 5) 128G SSD (Jetson Orin Nano, Jetson Orin NX) |
| Servo model | LD-1501MG |
| Map/Props | AI sandbox map for autonomous driving, traffic lights, road signs |
| Tutorials | Comprehensive tutorials, ROS source code, system image, supporting software |
Shipping & Delivery
1. Free Shipping Policy
Hiwonder offers free standard shipping on orders over US $499 (before tax and duties), delivered via trusted carriers such as DHL, UPS, or FedEx.
Most orders arrive within 6 working days after dispatch. You can check if your country is eligible for free shipping in the regions listed below.
Eligible Regions
- Americas: United States, Canada, Mexico, Chile
- Europe: Germany, United Kingdom, Netherlands, Switzerland, France, Austria, Italy, Belgium, Spain, Sweden, Finland, Norway, Portugal, Czech Republic, Poland, Greece, Slovenia, Romania, Denmark, Bulgaria, Luxembourg, Slovakia, Hungary, Ireland, Estonia, Lithuania
- Asia: China, Japan, Singapore, South Korea, United Arab Emirates, Malaysia, Thailand, Philippines, Indonesia
- Oceania: Australia, New Zealand
If your country or region is not listed above, the shipping cost will be automatically calculated at checkout once you enter your shipping address.
2. Customs & Import Fees
All international shipments are subject to local customs regulations. Import duties, taxes, or other fees may be charged by your country's customs authority upon arrival.
Our shipping term is FOB Shenzhen, which means these fees, if any, are the customer's responsibility. The shipping carriers will assist with the customs clearance process to ensure smooth delivery.
If a package is returned due to unpaid customs duties, any related return or reshipping fees will be deducted from your refund.
3. Order Processing Time
Orders are typically processed within 24 hours after placement and shipped the next business day.
Orders placed on weekends or public holidays will be shipped on the next working day.
Once shipped, you will receive a confirmation email with tracking information.

Questions & Answers
Have a Question?
-
Why is Jetson Orin NX 16GB not listed in the option ? Also perhaps include OpenClaw for this one as well ?
Hi there, you can contact us for the Orin NX 16GB version at email: support@hiwonder.com
-
Is the Jetson Orin NX board removable and useable in other projects or run it separately?
Hi there, yes you can take the board and use it for other projects.
-
Hello, I am interested in purchasing this product. I noticed the description says 'assembled,' which I assume means it ships fully built. However, I already have a Jetson Orin Nano board. Would it be possible to install and use my own board with this product?
Hi there, yes you can choose the version without controller and use your board. The operation is easy and we have tutorial to show you how to install your baord.


, Supports AI Vision, Voice Interaction, LiDAR, and Robotic Arm Attachment")
, Supports AI Vision, Voice Interaction, LiDAR, and Robotic Arm Attachment")





, Vision AI, Interactive Voice Response, and Hand-Eye Coordination")
, Vision AI, Interactive Voice Response, and Hand-Eye Coordination")







