









Hiwonder HX-35H Serial Bus High Voltage Servo with Double Shaft, 35KG Strong Torque and Data Feedback Function


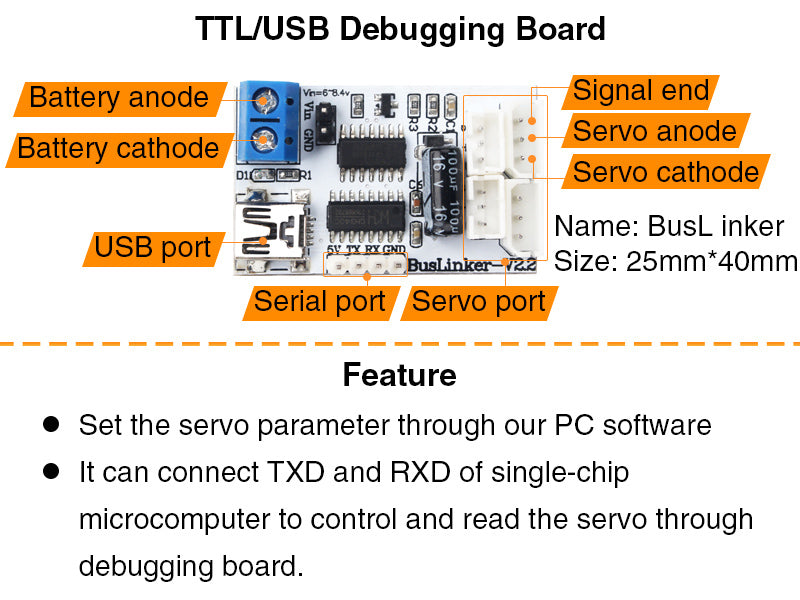
- User-friendly ports
- High precision and strong torque
- Support temperature, voltage and position feedback
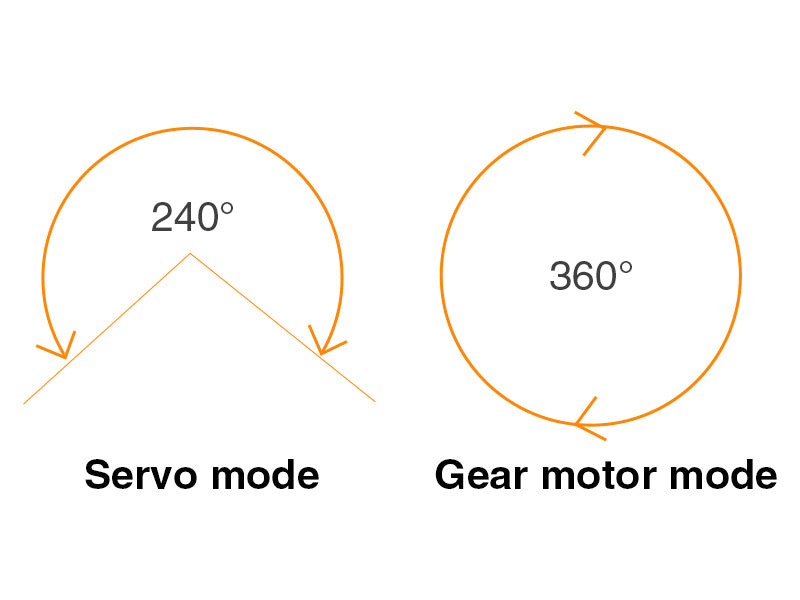
- Support two working modes: servo mode and gear motor mode
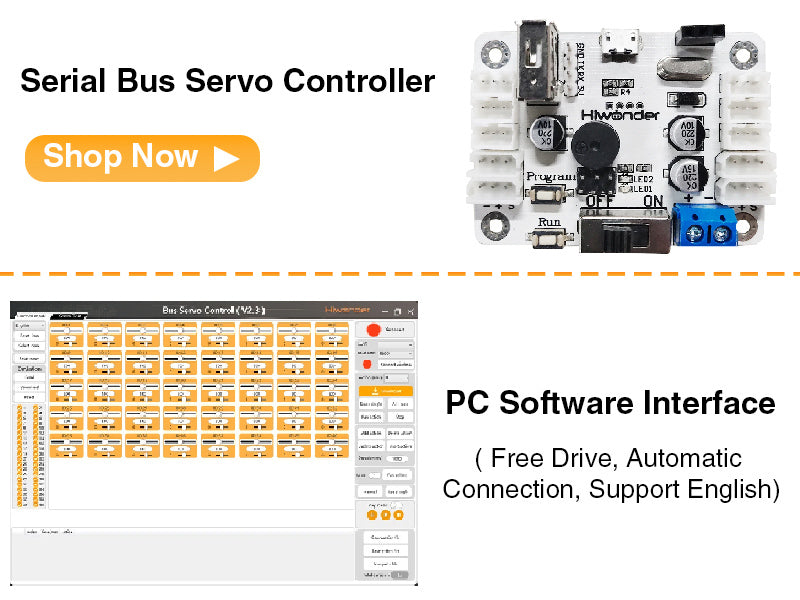
- Provide 51, Arduino, STM32, Raspberry Pi source code

The adopted high-accuracy potentiometer and metal gear contributes to greater performance. Besides, serial bus interface design helps to get rid of messy wiring and brings beautiful outlook to your robot project!
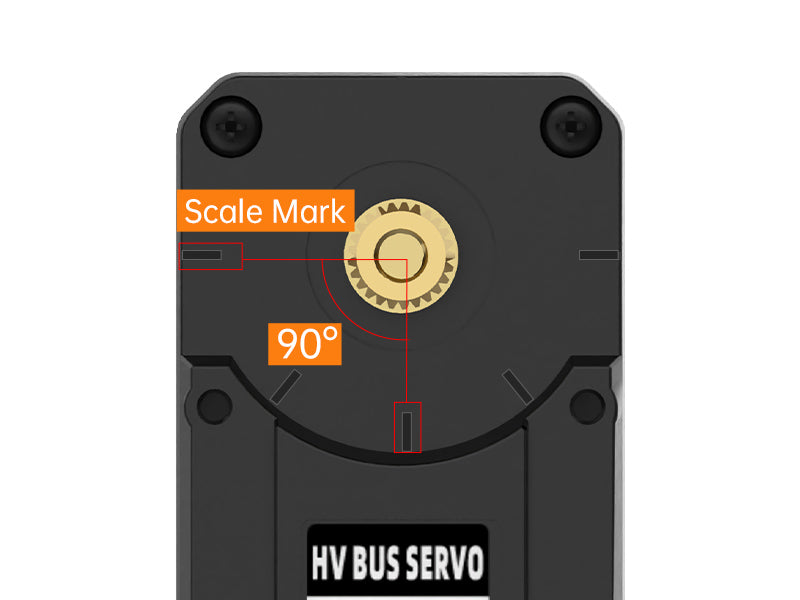
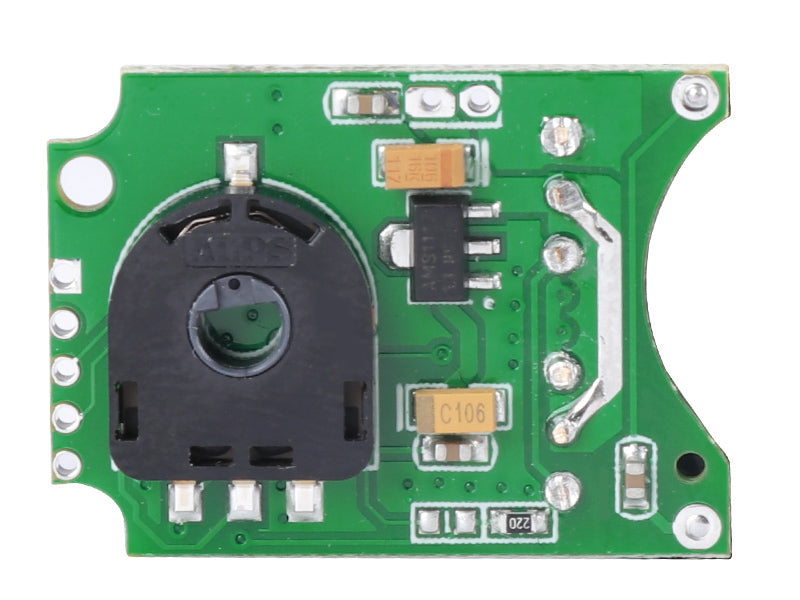
- Use high-accuracy potentiometer for angle feedback
- Adopt metal gear for higher torque and less noise
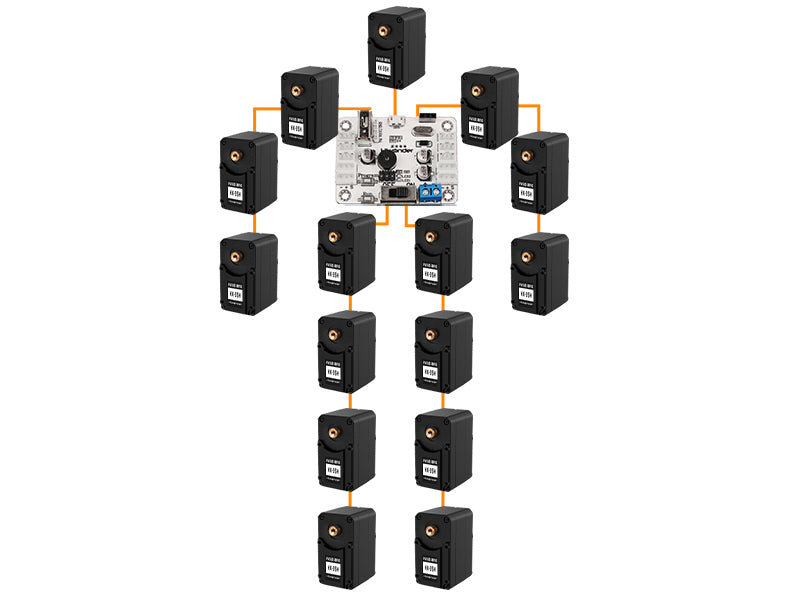
- Serial bus interface design beautifies the looking and facilitates the wiring
- Support temperature and voltage feedback function to effectively protect the servo
- Support two working modes, including servo mode and gear motor mode
- Use high-accuracy potentiometer for angle feedback
- Adopt metal gear for higher torque and less noise
- Serial bus interface design beautifies the looking and facilitates the wiring
- Support temperature and voltage feedback function to effectively protect the servo
- Support two working modes, including servo mode and gear motor mode


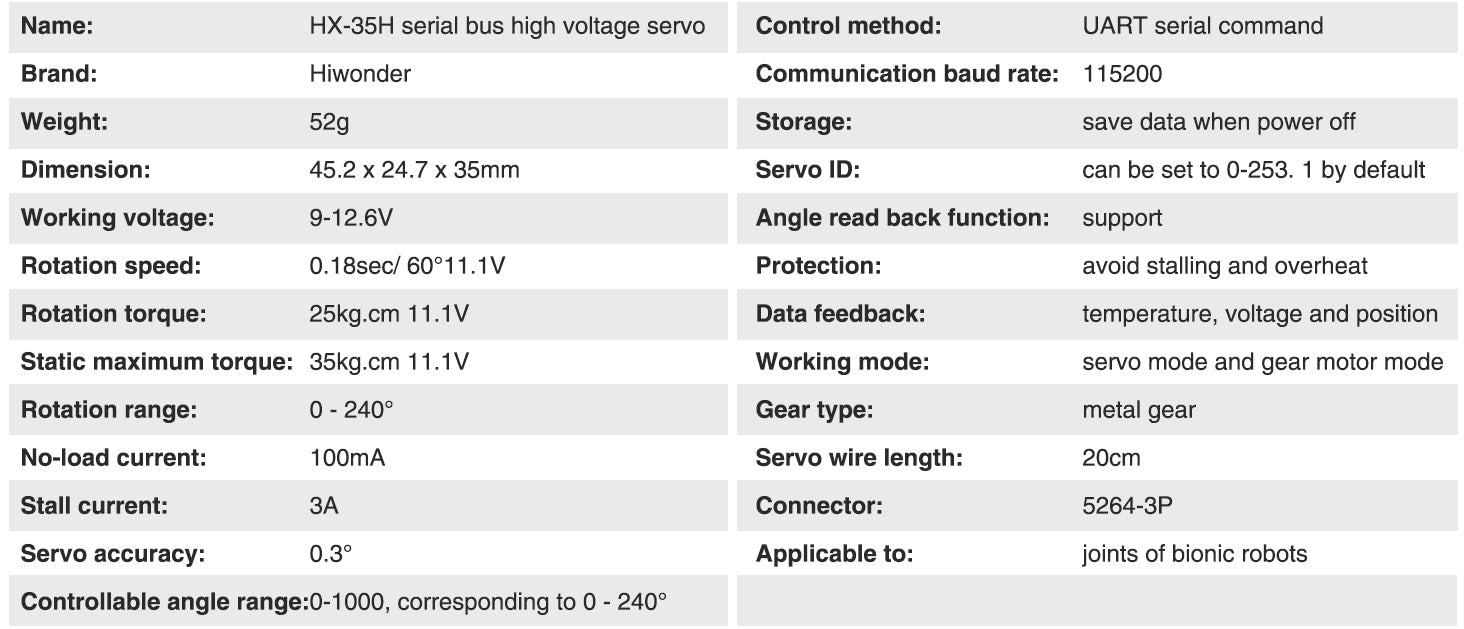
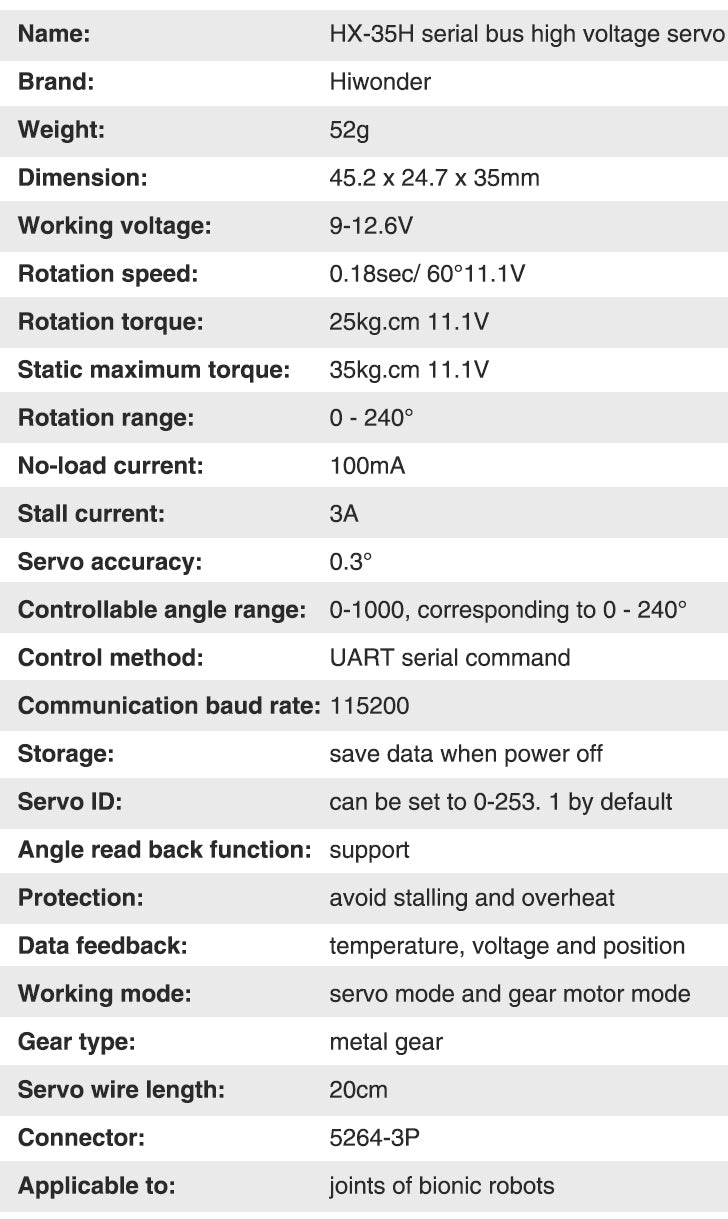







| Item | Specification |
| Name | HX-35H serial bus high voltage servo |
| Brand | Hiwonder |
| Weight | 52g |
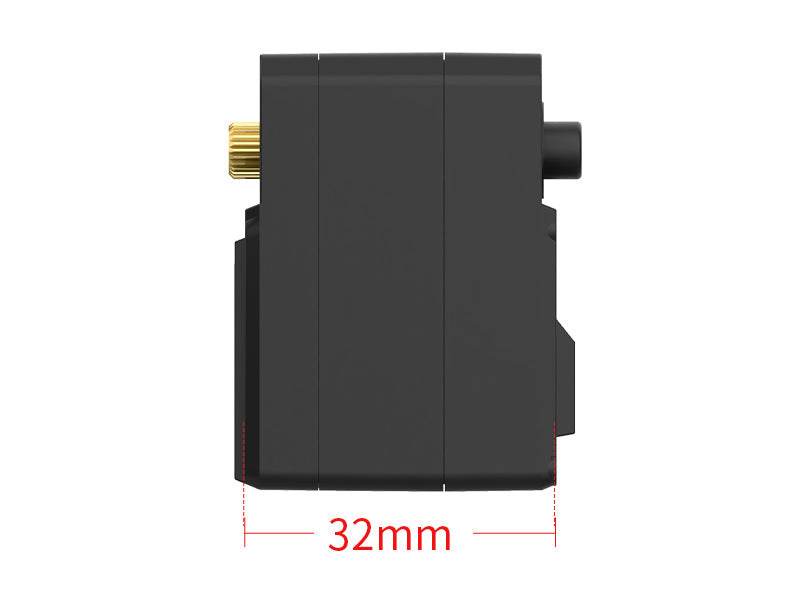
| Dimension | 45.2 x 24.7 x 35mm |
| Working voltage | 9-12.6v |
| Rotation speed | 0.18sec / 60° 11.1v |
| Rotation torque | 25kg.cm 11.1v |
| Static maximum torque | 35kg.cm 11.1v |
| Rotation range | 0-240° |
| No-load current | 100mA |
| Stall current | 3A |
| Servo accuracy | 0.3° |
| Controllable angle range | 0-1000,corresponding to 0-240° |
| Control method | UART serial command |
| Communication baud rate | 115200 |
| Storage | save data when power off |
| Servo ID | can be set to 0-253.1 by default |
| Angle read back function | support |
| Protection | avoid stalling and overheat |
| Data feedback | temperature, voltage, position |
| Working mode | servo mode and gear motor mode |
| Gear tape | metal gear |
| Servo wire length | 20cm |
| Connector | 5264-3P |
| Applicable to | joints of bionic robots |
| Package List |
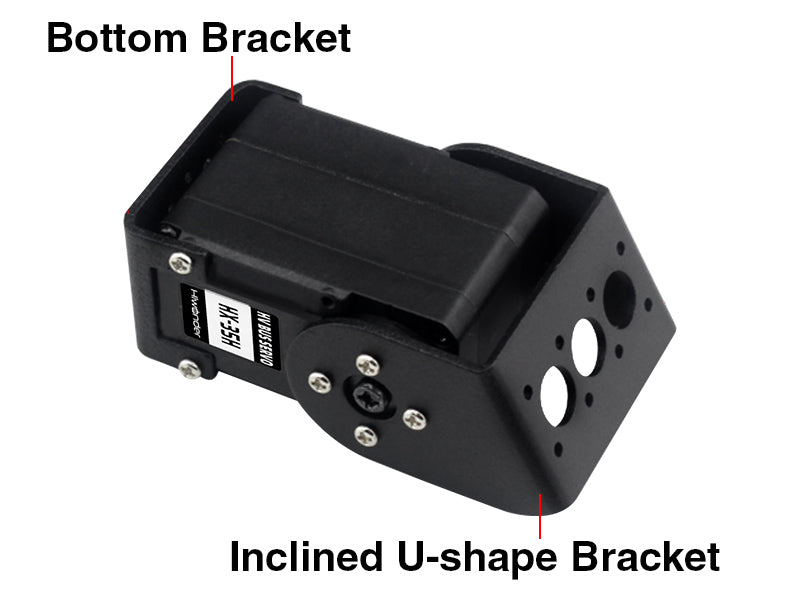
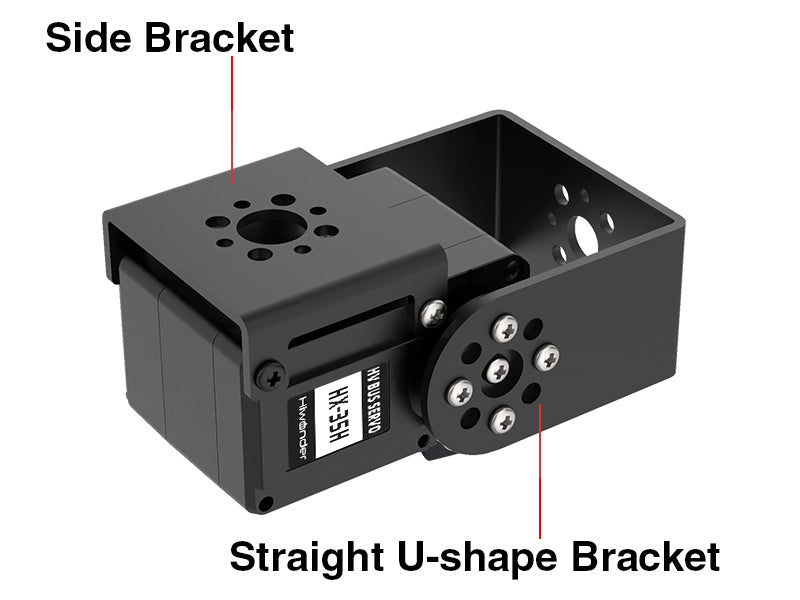
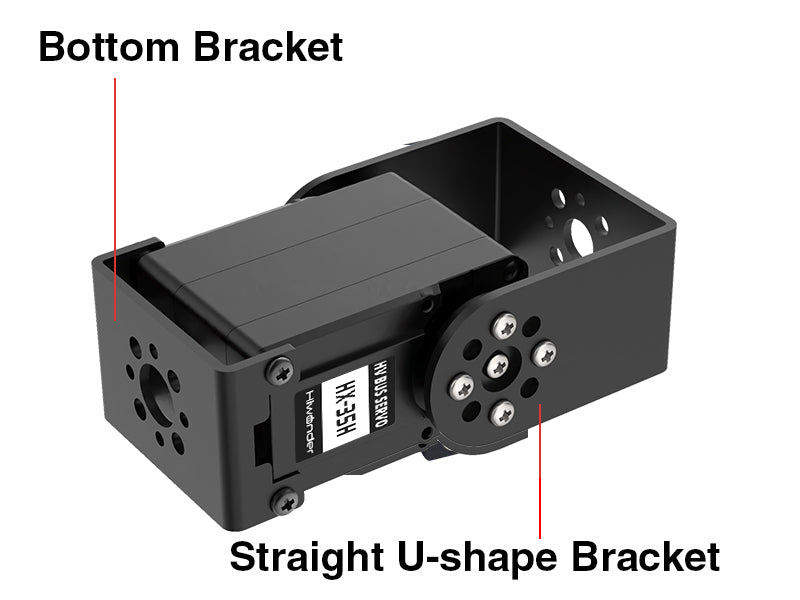
1* HX-35H servo 1* Plastic main servo horn 1* Plastic assistant servo horn 1* Servo wire (20cm) 1* Screw bag 1* Servo bracket pack (optional) 1* Metal servo horn pack (optional) |
Questions & Answers
Have a Question?
-
One of the data feedback is 'voltage' . What voltage it is ? Is it same as input voltage ? Does this voltage has any relationship with the load servo is bearing ?
Hi there! This voltage is the same as the input voltage. This voltage is related to the load on the servo bearing; within the servo motor voltage range: 9~12.6V, the higher the voltage, the greater the load.
-
When the servo is currently in the middle of execution of a previously sent command, can I send a new command without affecting the current operation? For example, let's say I previously sent a SERVO_MOVE_TIME_WRITE command to the servo to go to a position of 120 degrees in 10 seconds. And then, 2 seconds later (when the servo is still rotating), I send another command SERVO_MOVE_TIME_WAIT_WRITE to the servo but NOT actually start the move. Will this command affect the current servo rotation? Or will it only affect the servo rotation after I send the SERVO_MOVE_START command?
In a task, sending a new control instruction will impact the progress of the current instruction, either interrupting it and reporting an error, or executing the new instruction.


, Supports AI Vision, Voice Interaction, LiDAR, and Robotic Arm Attachment")
, Supports AI Vision, Voice Interaction, LiDAR, and Robotic Arm Attachment")



, Vision AI, Interactive Voice Response, and Hand-Eye Coordination")
, Vision AI, Interactive Voice Response, and Hand-Eye Coordination")









